한국과학기술원(KAIST) 엔지니어들이 네발 달린 로봇을 설계하고 제작했습니다.
시리즈의 스파이더맨에서 영감을 받은 로봇MARVEL 만화는 움직임을 위해 전자석과 자성 엘라스토머를 사용합니다. 자성 입자가 산재된 고무 같은 물질로 구성된 하이브리드 소재입니다. 자기를 켜고 끄면 로봇은 한 발로 벽의 수직 지점에 달라붙고 다른 다리가 움직이는 동안 버티고 다음 단계를 수행할 수 있습니다.
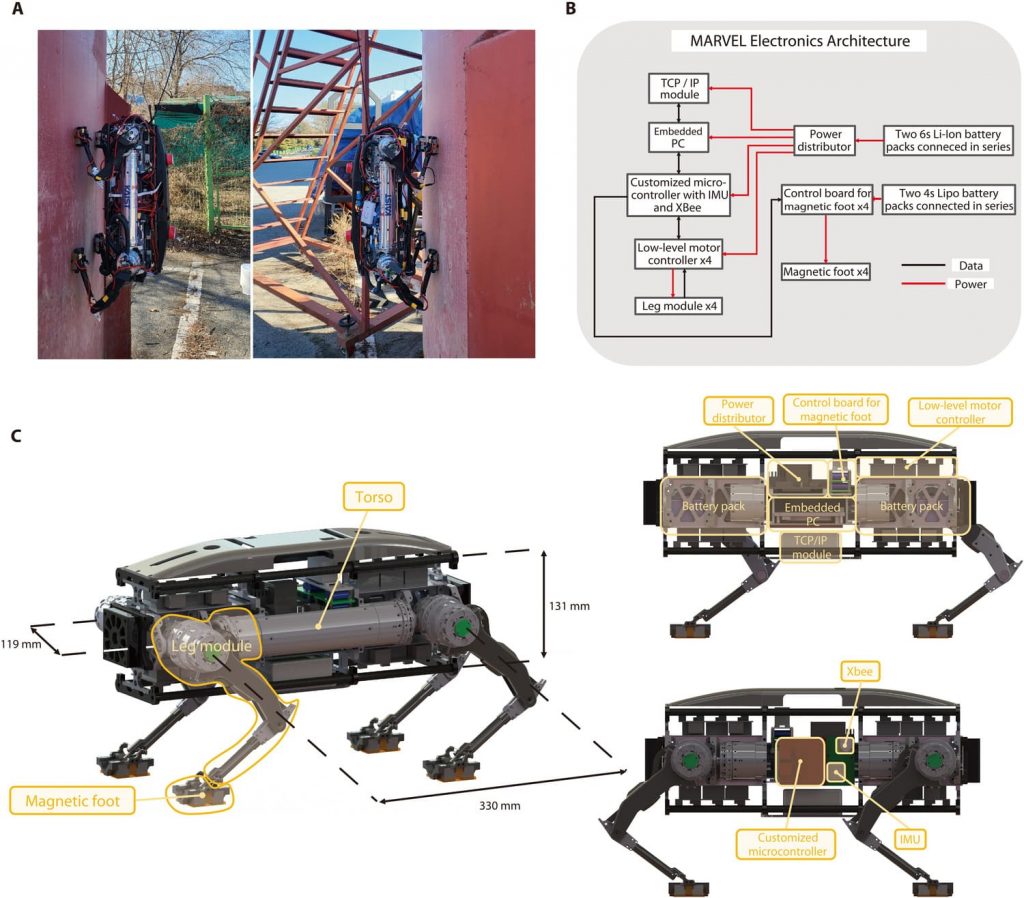 네발 로봇 MARVEL. 이미지: 홍승우 외, Science Robotics
네발 로봇 MARVEL. 이미지: 홍승우 외, Science Robotics
로봇이 벽을 따라 이동할 수 있도록엔지니어들은 로봇이 장애물을 피하도록 교육함으로써 로봇을 프로그래밍했습니다. 이를 위해 그는 고양이의 행동과 유사한 기술을 사용합니다. 로봇은 뒷다리를 움직이기 전에 앞발로 작은 첫 걸음을 내딛고 전진하기 전에 표면을 "테스트"합니다.
다리가 4개인 MARVEL 로봇이 탱크 위로 올라갑니다. 영상: 홍승우 외, Science Robotics
연구소에서 테스트로봇이 금속 벽을 오르고 천장을 걸을 수 있음을 보여주었습니다. 또한 그는 테스트를 성공적으로 통과했으며 유성 물질을 저장하기 위해 녹슨 주황색 벽이 있는 오래된 개방형 탱크로 올라갈 수 있었습니다.
로봇은 구조물을 오를 뿐만 아니라금속이 충분하지 않은 곳을 성공적으로 극복하고 장애물을 우회했습니다. 연구 결과 최대 3kg의 화물을 운반할 수 있는 것으로 나타났습니다. 지형에 따라 다양한 속도로 움직이며 적절한 장소에서 최대 0.7m/s까지 가속합니다.
네발 로봇 MARVEL이 짐을 들어 올립니다. 영상: 홍승우 외, Science Robotics
더 읽어보기 :
수소에너지, 방한소재, 코로나19 바이오첨가제: 과학자들이 북한에서 만들고 있는 것
과학자들은 공룡의 죽음으로 누가 이익을 얻었는지 알아냈습니다
우주에서 본 지구의 사진을 보세요. 첫 번째 개인 모듈에서 만든 것입니다.