매사추세츠 공과대학(MIT)의 에드워드 앤더슨(Edward Anderson) 교수와 그의 박사과정 학생인 산드라 리우(Sandra Liu)
그립은 두 개의 유연한 골이 있는 손가락으로 구성되어 있으며,그것은 그들이 접촉하는 물체의 모양에 적응합니다. 이 손가락은 많은 유사한 개발과 마찬가지로 3D 프린터에서 유연한 플라스틱 재료로 만들어집니다. 그러나 로봇에서 엔지니어들은 손가락 내부에 있는 가로 갈비뼈를 제거하고 강성을 부여했습니다. 대신 연구원들은 카메라와 센서를 설치했습니다.
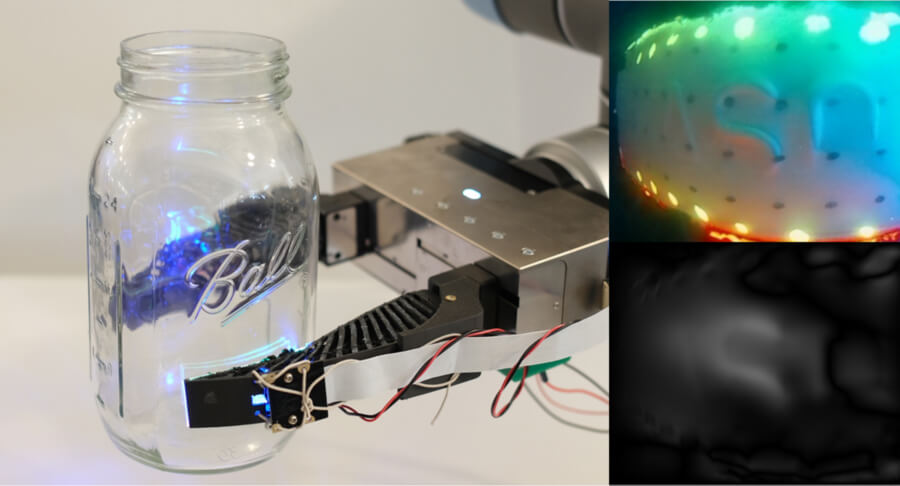
얇은 아크릴 시트가 캐비티 외부에 배치되고 "민감한"실리콘 젤 패드가 부착됩니다.캐비티 깊이에서 아크릴 층을 향한 카메라가 배치되고 전체 캐비티가 LED로 비춰집니다.
물체를 만질 때 손가락이 부드럽게 감싸그것은 물체의 윤곽과 병합됩니다. 카메라와 특수 알고리즘이 실리콘과 아크릴 시트의 변화를 분석합니다. 로봇은 분석을 기반으로 물체의 일반적인 모양, 표면의 불규칙성, 공간에서 물체의 방향, 물체를 압축하는 데 필요한 힘을 결정합니다.
연구원들은 그들의두 손가락 중 하나만 터치하여 캡처합니다. 그들이 만든 장치는 미니 드라이버, 플라스틱 딸기, 페인트 튜브, 와인 한 잔과 같은 다양한 개체를 성공적으로 조작했습니다. 동시에 내부 센서는 딸기를 포착할 때 표면의 알갱이를 성공적으로 감지할 수 있었고 항아리로 작업할 때 새겨진 이름을 읽을 수 있었습니다.
 출처: MIT 컴퓨터 과학 및 인공 지능 연구소
출처: MIT 컴퓨터 과학 및 인공 지능 연구소
작업 노트의 저자처럼 유리 개체빛의 굴절로 인한 컴퓨터 비전 센서의 과제를 나타냅니다. 촉각 센서를 사용하면 이 제한을 우회할 수 있습니다. 그립이 유리를 들어올렸을 때 그는 공간에서 줄기의 방향을 느꼈고 테이블로 내리기 전에 유리가 위로 향하고 있는지 확인할 수 있었습니다.
엔지니어는 내부에 공동을 생성한다는 점에 주목합니다.손가락이 그립의 안정성을 약간 방해했습니다. 과학자들은 이 단점을 수정하기 위해 장치 설계를 마무리할 계획입니다. 또한 과일 조각을 줍고 성숙도를 평가할 수 있는 세 손가락 그립을 개발할 계획입니다.
더 읽어보기 :
MIT는 터빈을 능가하는 고정식 열기관을 만듭니다.
10년의 연구 끝에 과학자들은 물리학의 표준 모델에 의문을 제기했습니다.
화성에서 일출이 어떻게 보이는지 확인하십시오