싱가포르 공과대학교 생명공학 로봇공학 및 설계 연구소 엔지니어
재프로그래밍 가능한 작업 공간을 갖춘 로봇 그리퍼. 비디오: SUTD
소프트 그립은 유연하고과학자들은 더 넓은 범위의 기하학적 구조를 안전하고 확실하게 잡고 깨지기 쉬운 물체를 조작할 수 있는 초탄성 재료라고 지적합니다. 그러나 동시에 기존의 소프트 드라이브는 작동 그립이 제한적이며 고도로 전문화된 작업을 수행하도록 설계되었습니다.
엔지니어들은 다음과 같은 소프트 드라이브를 개발했습니다.처음으로 이러한 한계를 극복했습니다. 새로운 장치는 다양한 접촉 영역 요구 사항을 가진 페이로드를 수용하도록 소프트 그립 작업 공간을 신속하게 수정할 수 있는 다중 모드 작동을 사용합니다. 이를 달성하기 위해 엔지니어들은 다양한 손가락 모양, 접이식 그립 및 확장 가능한 손바닥을 사용했습니다.
재프로그래밍 가능한 작업 공간이 있는 로봇 그리퍼. 동영상: Snehal Jain 외, Soft Robotics
재프로그래밍 가능한 작업 공간이 있는 로봇 그리퍼. 동영상: Snehal Jain 외, Soft Robotics
일련의 실험에서 연구자들은조정 가능한 작업 공간 그리퍼가 최대 1.5mm 반경의 개별 쌀알 또는 쿠스쿠스를 고정하거나 명함이나 종이와 같은 최대 300마이크론 두께의 얇은 물체를 집을 수 있음을 입증했습니다. 동시에 멜론을 들어 올리거나 최대 1.5kg의 시리얼 상자 또는 가방을 옮기는 것과 같이 크고 무거운 물체를 처리할 수 있습니다.
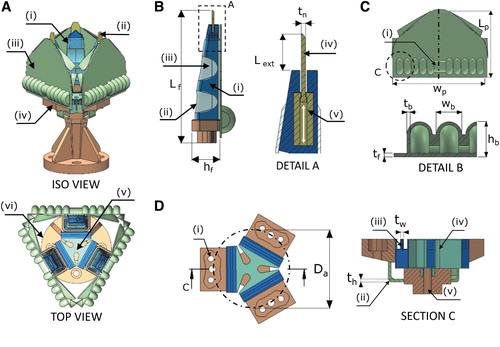 캡처 장치를 사용하면 작업 공간의 구성을 빠르게 변경할 수 있습니다. 이미지: Snehal Jain 외, Soft Robotics
캡처 장치를 사용하면 작업 공간의 구성을 빠르게 변경할 수 있습니다. 이미지: Snehal Jain 외, Soft Robotics
빠르게 변화하는 장치의 능력그렇지 않으면 다양한 장치가 필요한 많은 수의 작업을 수행할 수 있습니다. 개발자들은 이 장치가 소형 식품 및 대형 용기와 동시에 작업해야 하는 식품 산업에서 유용하다고 지적합니다.
더 읽어보기 :
가장 강력한 클래스 X 플레어는 태양에서 발생했습니다.
"항암 스펀지" 100% 전이 확산 막았다
로마 콘크리트의 내구성 비밀이 밝혀졌습니다. 복원이 가능합니다.