Dyret(노르웨이어로 "동물")이라는 이름은 Dynamic Robot for Embodied Testing의 약어입니다.
“우리는로봇은 지속적으로 몸매를 조정할 수 있습니다. 우리 로봇은 이것이 현대 기술로 쉽게 수행 될 수 있음을 증명합니다.”라고 UiO 컴퓨터 과학과의 선임 강사 인 Tonnes Nygaard는 설명합니다.
Dairet의 경우 몸의 모양을 바꾸는 것은 다리 길이를 조절한다는 것을 의미합니다. 체형 적응 메커니즘은 로봇에게 매우 유용한 것으로 입증되었습니다.
과학자들은 이전에 로봇이통제 된 실내 조건에서 다양한 환경에. 그런 다음 Nygaard는 호주의 Commonwealth Scientific and Industrial Research Organization (CSIRO)에서 동료 엔지니어와 6 개월을 보냈습니다. 그녀는자가 학습 로봇의 야외 테스트를 전문으로합니다.
“예전에는 너무 어렵다고 생각했는데현실 세계에 도달합니다. 로봇과 실험의 도움으로 이것이 가능하다는 것을 보여주었습니다.” Nygaard는 Titan.uio.no와의 인터뷰에서 설명합니다. 작업 결과는 저널에 게재되었습니다.자연 기계 지능.
다리 길이를 변경함으로써 로봇은자동으로 몸의 모양을 변경합니다. 형태 학적 적응 형 로봇은 예상치 못한 상황이 발생할 때마다 구조를 재 설계하거나 재건하지 않고도 예측할 수없는 환경에서 작동하고 새로운 도전에 직면 할 수 있습니다.
인간은 예를 들어 콘크리트에서 잔디로 로봇이 움직이는 것이 얼마나 어려운지 상상하기 어렵습니다. 사람은 로봇에 비해 수년 간의 경험과 많은 감정을 가지고 있음을 잊지 마십시오.
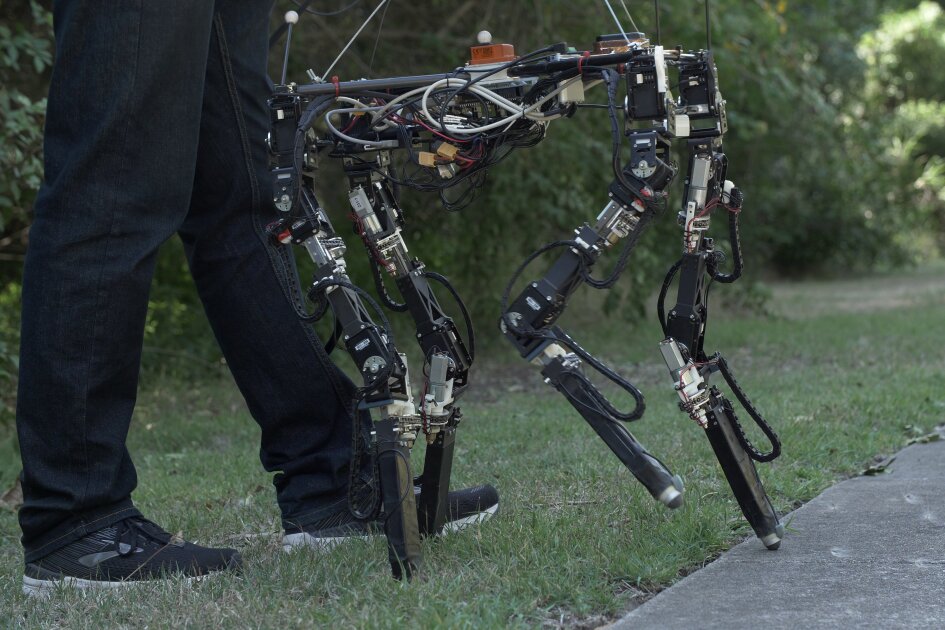 잔디에서 콘크리트로 :자가 학습 로봇의 거대한 도약. 크레딧 : Tønnes Nygaard / UiO.
잔디에서 콘크리트로 :자가 학습 로봇의 거대한 도약. 크레딧 : Tønnes Nygaard / UiO.
“로봇은 카메라를 사용하여Nygaard는 지형이 얼마나 거친 지, 다리의 센서를 통해 표면이 걷는 것이 얼마나 어려운지를 결정합니다. "Diret은 그가 걸어 다니는 환경에 대해 끊임없이 배우고 있으며 통제 된 환경에서 실내에서 얻은 지식과 결합하여이를 사용하여 신체를 적응시킵니다."
Diret이 잔디 위를 걸으라는 요청을 받았을 때전에는 잔디를 본 적이 없습니다. 그는 자갈, 모래 및 콘크리트에 대해서만 훈련했습니다. 그러나 그는 호주 잔디 위를 걷는 법과 이상적인 다리 길이가 무엇인지 빨리 배웠습니다. 짧은 다리는 로봇에 더 나은 안정성을 제공하는 반면 긴 다리는지면이 충분히 예측 가능한 경우 더 빠른 보행 속도를 제공하는 것으로 나타났습니다.
평평한 잔디는 가장 크지 않을 수 있습니다하지만 자연의 풀은 다리가 긴 로봇을 가둘 수있는 뭉치와 구멍으로 가득 차 있기 때문에 Dairet은 다리를 짧게 만듭니다. 구체적으로 그는 그들을 뽑아 내고 "도망"할 수 있습니다.
로봇은 또한 예상치 못한 장애물에 부딪 힐 때 피해에 적응합니다.
“우리 기술을 사용하면 로봇이다리 중 하나가 약해지거나 부러지는 것에 적응합니다. 절뚝거리거나 다른 세 다리의 길이를 줄여 회복하는 방법을 배울 수 있습니다.”라고 Nygaard는 말합니다. 자신의 실수와 실패로부터 학습함으로써 Dayret은 자신의 환경에 더 잘 적응합니다.
Dairet이 진지하게 대처할 준비가 될 때까지작업. Nygaard 박사의 목표는 기술을 개발하고 적절한 재료를 찾고 가능함을 증명하는 것이 었습니다. 그러나 그는 몇 가지 가능한 미래 용도를 본다. 예를 들어, 로봇은 수색 및 구조 작업뿐만 아니라 다양한 어려운 표면과 기상 조건이있는 농업에서도 유용합니다. 또한 Dairet은 사람들이 구하기 어려운 광산 탐사를 도울 것입니다.
더 읽어보기
물리학 자들은 블랙홀의 아날로그를 만들어 호킹의 이론을 확인했습니다. 어디로 가는가?
천왕성은 태양계에서 가장 이상한 행성의 지위를 받았습니다. 왜?
Perseverance Rover의 SuperCam 과학 기기는 첫 번째 결과를 지구로 보냅니다.