연구원들이 다양한 환경에서 적응할 수 있는 로봇을 개발했습니다.
엔지니어들이 낮은 땅딸막한 로봇을 만들었습니다.너비 약 30cm, 길이 20cm - 네 개의 물결 모양 텔레스코픽 팔다리가 있습니다. 각 팔다리는 6개의 중첩된 동심원 튜브로 구성됩니다. 스프링과 연결된 이 다리 부분은 로봇이 좁은 공간을 이동할 때 자동으로 수축했다가 다시 펴집니다.
팔다리의 길이를 바꾸는 로봇. 비디오: E. Lathrop 외, 고급 지능형 시스템
저자는 장치가 사용하지 않는다는 점에 주목합니다.터치 센서와 복잡한 계산. 신체 매개 변수 변경은 역학에 의해서만 규제됩니다. 이는 추가 장비를 제거하여 로봇의 크기를 줄이고 이동 속도를 높입니다. 기계식 로봇은 팔다리의 경로와 궤적을 계산할 필요가 없습니다.
일련의 실험에서 엔지니어들은다리 부분을 변경하면 로봇이 좁은 터널을 통과하고 낮은 천장 아래로 기어갈 수 있습니다. 적응성 덕분에 전체 너비의 72%, 전체 높이의 68%에 불과한 공간에 맞출 수 있습니다.
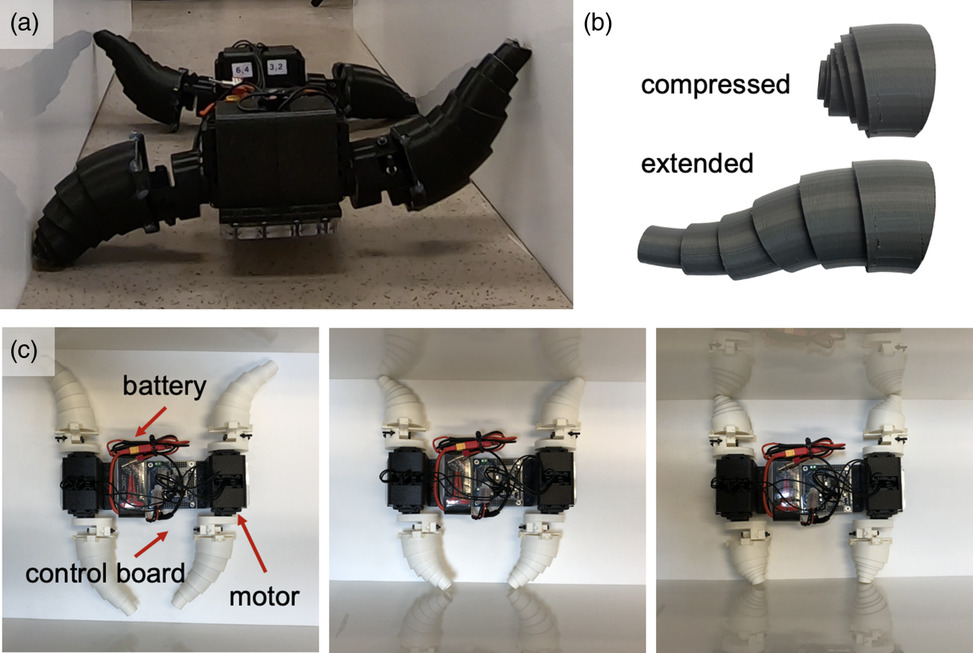 로봇 장치. 이미지: E. Lathrop 외, Advanced Intelligent Systems
로봇 장치. 이미지: E. Lathrop 외, Advanced Intelligent Systems
개발에 사용된 아이디어는 차용개미에서. 이 곤충들은 작은 공간을 기어다니도록 자세를 조정합니다. 그리고 그들은 고르지 않은 지형이나 작은 장애물에 방해받지 않습니다. 예를 들어, 작은 장애물에 부딪히면 다리가 약간 구부러지는 반면 곤충은 계속해서 빠르게 앞으로 나아갑니다.
정교한 장비가 없는 소형 로봇생산하기에 충분히 쉽다고 과학자들은 말합니다. 미래에는 복잡한 환경을 탐색하고 구조 작업을 수행하는 데 사용할 수 있습니다. 불행히도 주요 단점은 취약성입니다. 엔지니어들은 장치의 강도를 높이고 기술 적용 가능성을 확장하기 위해 계속 노력할 것입니다.
더 읽어보기 :
기록적인 깊이로 시추된 중국 땅
지구에 관한 것이 아닙니다. 과학자들은 태양계가 가장 희귀한 이유를 설명했습니다.
200년 된 생물학 미스터리 마침내 풀렸다