로봇은 누구인가?
몇 년 전 Reddit에 멋진 내용이 나타났습니다. 과학자들은 복잡한 현상을 설명했습니다.
로봇 공학은 시너지 효과가 적용됩니다.활동 분야. 프로그래밍, 메카트로닉스 및 사이버네틱스로 구성됩니다. 메카트로닉스는 현실 세계와 상호 작용하는 것입니다. 그리고 사이버네틱스는 무엇보다도 생성된 프로그램의 관리를 포함하는 다중 연결 과학입니다.
로봇이란 무엇입니까?15년 전만 해도 공장에서 용접이나 페인팅을 하는 로봇팔이라고 많은 사람들이 말했을 것입니다. 또 다른 인기 있는 대답은 영화계의 안드로이드 로봇입니다. 하지만 움직이는 카트인가 무인자동차인가? 예, 이것은 또한 로봇 공학의 영역 중 하나입니다. 항공기도 로봇이며, 최신 개발 중 일부는 지능형 기술을 포함하며 실제로는 자율 로봇입니다.
 모바일 카트도 로봇이다
모바일 카트도 로봇이다
분야와 같은 로봇 공학 분야도 있습니다.로봇 - "모바일 로봇". 여기에는 현장, 건물 또는 수중에서 움직이는 모든 로봇이 포함됩니다. 제 생각에 가장 흥미로운 응용 프로그램은 농업입니다.
항공기의 역사
항공기의 역사는 과거에 시작되었습니다.세기. 그 전에는 엔진이 없는 풍선만 날아가서 로봇이라고 부르기도 어려웠다. 지난 세기 초에 비행선과 비행기의 두 가지 유형의 항공기가 작동했습니다. 최초의 통제 비행은 Wright 형제에 의해 이루어졌습니다. 더욱이 첫 번째 자동 조종 장치는 그로부터 거의 10년 후에 매우 빠르게 등장하여 비행을 안정화하는 데 도움이 되었습니다.
로봇 공학의 현재 방향은 다음과 관련이 있습니다.PixHawk와 같은 새로운 개방형 자동 조종 장치의 개발 및 가용성(PixHawk는 컨트롤러, 드론 및 기타 UAV용 개방형 하드웨어입니다. 학술, 아마추어 및 전문 목적으로 사용됨). 모든 사람의 삶에 드론이 도착한 예는 Dodo Pizza 회사가 Copt Express와 함께 피자를 배달한 것입니다. 이것은 2014년에 일어났습니다.
 항공기의 역사
항공기의 역사
드론을 제어하는 방법
현대 항공기는 하나를 사용합니다.양력 생성의 세 가지 원칙(항공기, 제트기 또는 공기역학). 비행의 공기역학적 원리와 양력의 생성(공기의 일부를 던지는 것)은 고정된 베어링 표면(날개)이 장착된 전체 장치의 움직임으로 인해 또는 개별 베어링 부품의 움직임으로 인해 구현될 수 있습니다. 공기에 대한 장치(메인 로터, 팬)의 상대.
 장치가 날아가는 방식
장치가 날아가는 방식
드론에는 양력을 생성하는 프로펠러가 있습니다.땅에서 떨어지면 장치가 프로펠러를 더 빨리 움직이기 시작하고 위로 올라갑니다. 그러나 작용력은 반작용력과 같다. 프로펠러가 회전하면 반대 방향으로 순간이 생성됩니다. 이것이 헬리콥터와 헬리콥터의 디자인입니다. 헬리콥터에 프로펠러가 하나 있으면 안정적이지 않습니다. 따라서 장치는 2-로터 방식 또는 테일 로터를 사용합니다.
쿼드콥터는 매우 단순한 디자인을 가지고 있습니다.일반적으로 4개의 나사가 있으며 그 중 2개는 한 방향으로 회전하고 2개는 다른 방향으로 회전합니다. 사용자가 앞으로 나아가야 하는 경우 일부 프로펠러는 느리게 회전하고 다른 프로펠러는 더 빠르게 회전합니다. 그리고 사용자가 회전을 원하면 대각선으로 배치된 일부 나사는 가속되고 다른 나사는 속도가 느려집니다.
 쿼드콥터의 비행 방법
쿼드콥터의 비행 방법
코너에서 헬리콥터의 움직임은 코너를 따라 움직이는 것과 관련이 있습니다.좌표. 조종사가 앞으로 이동하려면 먼저 드론을 앞으로 기울인 다음 전기 장치가 앞으로 당겨짐에 따라 우리가 머무르고 싶은 지점에서 드론을 안정화해야 합니다.
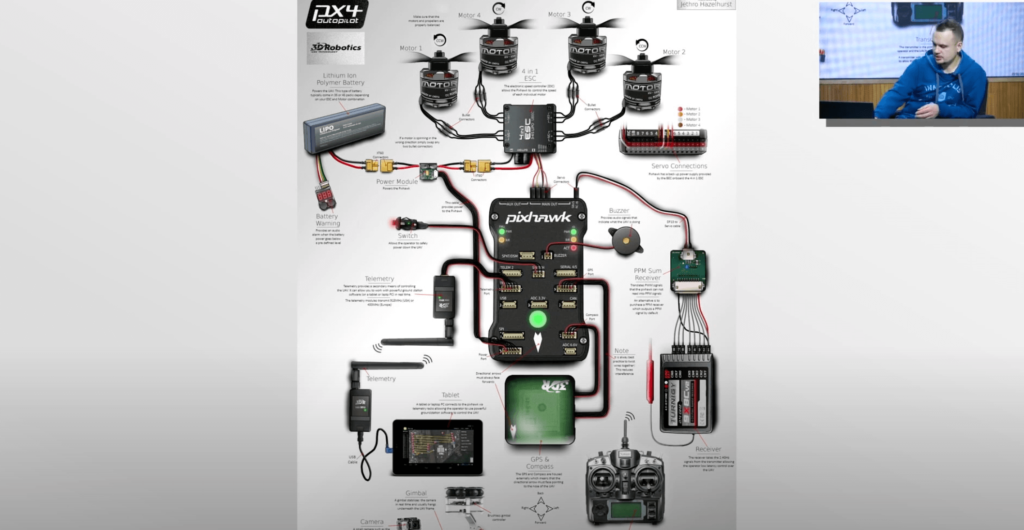
이것은 가장 인기있는 자동 조종 장치의 다이어그램입니다.새로운 장치를 만들 수 있는 기반. 모든 모터 및 센서에 연결됩니다. 또한 모터에는 모터의 속도를 제어하는 자체 제어 장치인 ESC 조절기 - 전자 속도 컨트롤러가 있습니다.
센서 중 GPS가 있어 드론이야외에서 일하고, 포인트로 날아가 위치를 안정화하십시오. 그러나 자동 조종 장치 자체 내부에는 자세 각도를 결정할 수 있는 관성 센서 모듈인 IMU도 있습니다. 통신 채널, 지상 관제소 및 배터리도 있습니다.
 무인 항공기
무인 항공기
위에서 언급했듯이 레벨이 있습니다.엔진 제어 - 우리는 주저없이 회전 속도를 설정할 수 있습니다. 나머지 레벨은 동일한 원칙에 따라 작동합니다. 다음 레벨은 방향 제어입니다.
그러나 먼저 회전 속도를 제어해야 합니다.- FPV 헬리콥터는 이 수준에서 비행합니다(1인칭 시점에서 드론의 카메라에서 실시간으로 사진을 볼 수 있는 장치(FPV - 1인칭 시점). 숙련된 조종사가 회전 속도를 설정하고 조이스틱으로 지속적으로 조종합니다. 다음 단계는 사용자가 각도를 안정화할 수 있지만 드론은 계속 움직일 때입니다. 다음은 속도 제어이고 가장 높은 단계는 위치 제어, 특정 지점으로 이동하거나 주어진 궤적을 따라 이동하는 기동입니다.
프로그래밍, 빌드 및드론 제어 - PIX4 오픈 소스 자동 조종 장치에 주의를 기울여야 합니다. 공중 로봇 공학(ROS - 로봇 운영 체제 또는 개방형 로봇 공학)과 관련된 전체 커뮤니티가 있으며 드론용 시뮬레이터가 있습니다. 따라서 드론 자체가 없어도 시뮬레이터에서 많은 실험을 할 수 있습니다.
드론 개발 단계
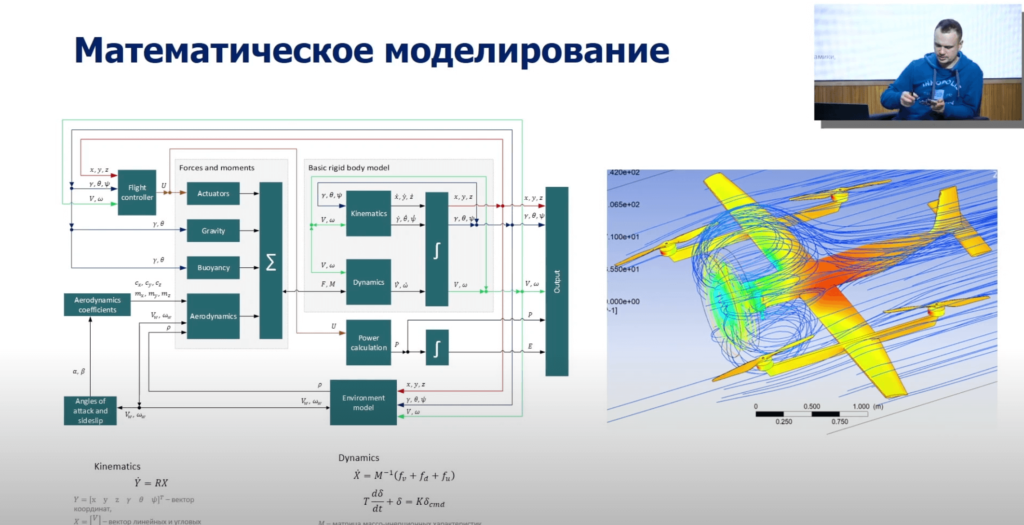
연구자들은 개념적인 것부터 시작한다.모델링한 다음 장치의 정확한 모델을 구축해야 합니다. 공식에 들어가지 않으면 헬리콥터 모델은 본질적으로 강체 모델입니다. 이것은 입자 시스템으로 확장된 뉴턴의 제2법칙입니다. 여기에는 병진 및 회전 운동이 있고 운동학 및 운동 역학이 있으며 특정 장치의 모델을 설명하려면 여기에 특정 드론에 작용하는 힘의 방정식을 추가해야 합니다.
 UAV 모델링 방법
UAV 모델링 방법
다음 단계는 시스템을 개발하는 것입니다.관리. 고전적인 방식으로 가면 먼저 정확한 수학적 모델을 찾고 이를 기반으로 이미 제어 알고리즘이나 새로운 공식을 합성합니다. 모션 계획, 환경 인식, 센서를 통한 상태 추정 등 모든 수준이 제어 시스템에 포함될 수 있습니다. 알고리즘을 사용하면 좌표와 데이터를 세분화할 수 있습니다.
 드론 제어 시스템
드론 제어 시스템
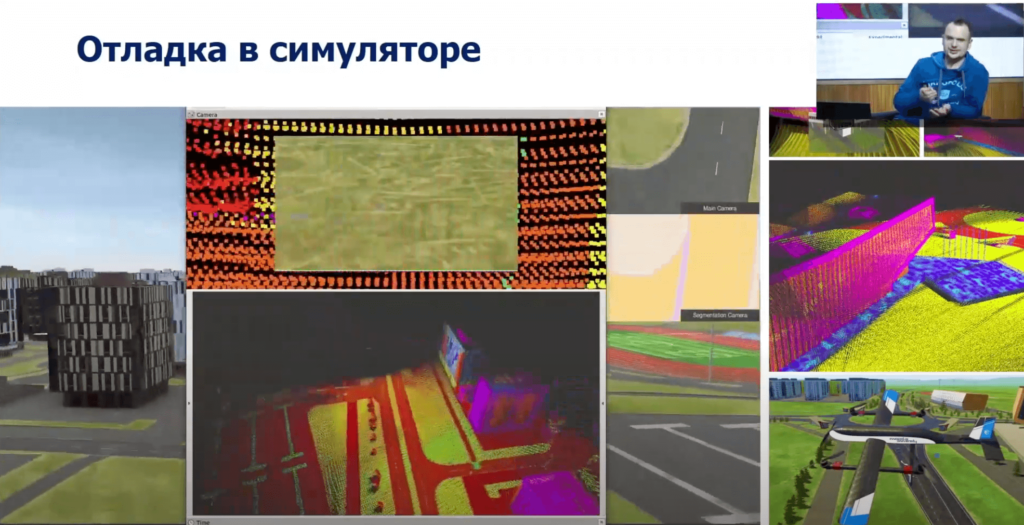
제어 알고리즘이 있으면 즉시 가능합니다.적용하지만 그렇게 하면 비용이 꽤 많이 듭니다. 사소한 오류로 인해 장치가 충돌합니다. 이를 고려하고 백업해야 합니다. 테스트에는 시뮬레이터가 사용됩니다.
아래는 Innopolis 가상 투어입니다.우리 대학의 제품이며 GitHub에서 다운로드할 수 있습니다. 이것은 시각적 구성 요소 일뿐만 아니라 장치의 모든 센서 데이터입니다. 모든 위치 센서가 있고 드론처럼 제어되며 모든 제어 알고리즘을 디버깅할 수 있습니다.
 드론이 시뮬레이션에서 학습하는 방법
드론이 시뮬레이션에서 학습하는 방법
시뮬레이터에 대한 경험을 바탕으로 나타날 때더 많은 확신 - 하드웨어 구현으로 이동할 수 있습니다. 탄소 및 복합 재료로 장치 제조, 전자 제품 생성, 엔진 배치, 고정 장치의 구성 요소가 여기에 표시됩니다.
테스트는 길거리에서 시작되지 않습니다.먼저 장치를 서스펜션이나 특수 스탠드에서 테스트합니다. 무인 항공기의 기능 요소를 디버깅하는 데 사용할 수 있습니다. 예를 들어, 여기에 수직 이착륙 항공기가 표시됩니다. 이것은 헬리콥터와 비행기의 하이브리드입니다. 비디오에서 이 항공기가 외부 방해에 어떻게 대처하고 각도를 유지하는지 확인할 수 있습니다. 오른쪽에는 동시에 5개의 엔진을 가동하고 제어 시스템이 이를 어떻게 처리하는지 확인하는 꽤 말도 안되는 실험이 있습니다.
 드론은 어떻게 만들어지는가
드론은 어떻게 만들어지는가
테스트 후 비행으로 이동합니다.저속에서 작은 이륙, 조종할 수 있는 조종사와 함께 제어된 움직임. 마지막 코드는 완전히 무인 비행입니다.
장치가 수직으로 이륙합니다."콥터처럼" 주 엔진이 켜지면 드론이 가속되고 비행기 모드로 전환되며 날개가 작동할 수 있을 만큼 충분한 속도가 발생합니다. 그런 다음 윤곽선 프로펠러가 꺼지고 비행기처럼 날아갑니다. 착륙 과정은 역순으로 수행됩니다.
드론에 무슨 일이?
현대인이 하는 일 중 하나는과학자 - 비행 중 장애물 우회. 일부 드론은 이미 이 작업을 수행하는 방법을 알고 있지만 작업은 조금 더 광범위합니다. 장애물이 있는 환경에서 장치가 가능한 한 빨리 움직이도록 가르쳐야 합니다. 그리고 알고리즘을 개선하기 위해 노력하고 개선할 여지가 여전히 있습니다.
그러한 테스트의 또 다른 예는 다음으로 비행하는 것입니다.숲. 매우 흥미로운 접근 방식이 있습니다. 여기에는 새로운 알고리즘뿐만 아니라 이벤트 카메라인 센서도 사용됩니다. 이것은 모든 시간 단위에서 프레임 간의 차이를 전송하는 초고주파 카메라입니다. 이를 통해 장애물을 빠르게 제어하고 대응할 수 있습니다.
드론 모션 플래닝 분야에서는경쟁: 누가 더 빨리 할 것인가. 작업은 미지의 영역을 매핑하고, 3차원 표현을 만들고, 그 위에서 물체를 찾는 것입니다. 우리는 대학에서 날았지만 물건을 찾는 문제도 해결했습니다. 우리의 결과는 알려진 공개 알고리즘보다 훨씬 뛰어났습니다.
드론 경주에는 대회가 있습니다.조종사가 고글을 착용하고 가능한 한 빨리 게이트를 통과하기 위해 무인 항공기를 제어 할 때 카메라가있는 장치에서 만들어집니다. 자동 모드에서 동일한 작업을 수행해야 하는 아주 멋진 이벤트입니다. 불행히도, 지금까지 컴퓨터는 체스에서만 사람을 물리 칠 수 있었고 드론 로봇은 이미 진행 상황이 상당히 심각했지만 인간 조종사를 따라 잡을 수 없었습니다. 머신 비전 알고리즘의 도움으로 드론은 이러한 작업을 수행할 수 있으며 작업은 속도를 높이는 것뿐입니다.
또 다른 경쟁은 Microsoft Games of드론은 시뮬레이터에서 수행됩니다. 사우디 아라비아의 유명한 주요 대회 중 하나가 같은 지역에서 개최됩니다. 참가자들은 3년 동안 미리 모집합니다.
드론 쇼에는 무인 장치가 사용됩니다.- 이것은 오늘날 불꽃놀이를 대체하는 화려한 행사입니다. 하지만 이것이 그룹 용도로만 사용되는 것은 아닙니다. 그들은 더 넓은 지역을 검사할 수 있습니다.
신청처
독점적으로 과학적으로 보이지 않도록아래는 Skydio 드론의 데모입니다. 이제 이것은 자율성 측면에서 가장 진보된 장치입니다. 이것은 사용자가 이미 사용할 수 있는 제품에서 지도 제작, 장애물 회피, 교통 계획과 같은 현대 기술이 함께 사용되는 방법의 한 예입니다.
또 다른 방향은 새로운 디자인이다항공기. 그 중 하나가 접이식 드론이다. 그러한 장치 중 하나는 사고 후 검사를 위해 좁은 공간으로 날아갈 수 있습니다. 또 다른 예로는 펼칠 수 있는 드론이 있습니다. 예를 들어, 그는 좁은 공압 튜브 밖으로 날아간 다음 평소처럼 날아갈 수 있습니다.
우리는 또한 이 분야에서 프로젝트를 가지고 있습니다 - 이것은소프트 텐소드론. 이것은 하늘을 나는 최초의 소프트쉘 드론입니다. 기쁨은 당신이 그것을 떨어 뜨리고 그대로 남아있을 수 있다는 것입니다. 또한 빔의 길이, 케이블의 장력을 변경할 수 있습니다.
현실로 다가올 두 가지 예곧. 첫째, 드론을 이용한 배송이다. 이제 소포 터미널과 드론 착륙 스테이션을 결합하는 매우 흥미로운 구현이 있습니다. 이 경우 드론이 언제 도착할지, 어디에 착륙할지 걱정할 필요가 없습니다. 화물이 도난당하기 전에 제 시간에 맞춰 화물을 픽업하십시오. 두 번째 예는 하늘을 나는 택시입니다. 이것은 개발에서 가장 흥미로운 영역이며 이미 작동 중인 프로토타입이 있습니다. 그러나 이것은 앞으로 10년 안에만 일어날 것입니다.
지난 6년 동안 비행 택시 분야에서 어떤 발전이 나타났습니까?
- 회사 "Hover"는 다음과 같은 장치를 제시했습니다.자동차와 같은 저소음 전기 모터와 컴팩트한 치수. 150m 높이로 이륙하여 표준 주차 공간에 착륙합니다. 드론은 2명의 승객을 위해 설계되었으며 최대 탑재량은 300kg, 속도는 200km/h입니다.
— 2016년 러시아 회사 Hoversurf도시의 일반 주차장에서 언제든지 이륙할 수 있는 호버바이크를 선보였습니다. 최대 100km/h의 속도에 도달하고 안전상의 이유로 들어 올리는 높이는 5m로 강제 제한됩니다.
— 2018년 에어버스 승객이 개발알파원 VTOL 항공기는 5m 높이까지 올라 53초 동안 공중에 머물렀다. 사용자는 응용 프로그램을 통해 UAV를 호출하고 도시 안팎에서 한 지점에서 다른 지점으로 이동할 수 있습니다.
— 2020년에 CityAirbus 에어 택시는첫 자유 비행. 테스트는 일드프랑스(Ile-de-France) 시인 파리 교외에서 진행되었으며, CityAirbus 항공기는 최대 30km 거리에서 최대 120km/h의 속도로 이동할 수 있습니다. 하늘을 나는 택시의 무게는 2.2톤이 넘는다. CityAirbus는 조수석 3석과 운전석 1석을 갖추고 있다.
- 2022년 중국 스타트업 Pantuo Aviation은 공기 덕트가 있는 비행 택시 시연기 T1을 출시했습니다. 300km/h 이상의 속도로 비행할 것이며 250km의 범위를 가질 것입니다.
더 읽어보기 :
우주 탐사선은 수성에서 200km를 비행했습니다. 그가 본 것을 봐
과학자들은 비타민이 암 발병에 어떻게 영향을 미치는지 밝혀냅니다.
포르노 콘텐츠를 본 사람이 경보를 울리는 중국의 마음 읽기 헬멧