Kembridžo universiteto inžinieriai sukūrė minkštą roboto ranką, ant kurios buvo atspausdinta
Tyrėjai naudojo spausdintąAntropomorfinė ranka, implantuota lytėjimo jutikliais 3D spausdintuve, kad ranka galėtų „pajusti“, ką liečia. Ranka galėjo pasyviai judėti tik riešo pagrindu. „Didysis šio dizaino pranašumas yra judesių diapazonas, kurį galime pasiekti nenaudodami jokių pavarų“, – sako autoriai.
„Pasyvios“ robotinės rankos lavinimas. Vaizdo įrašas: Kembridžo universitetas
Mokslininkai atliko daugiau nei 1200 bandymų su roboto ranka,stebint jos gebėjimą sugriebti mažus daiktus jų nenumetant. Iš pradžių robotas buvo apmokytas naudojant mažus 3D spausdintus plastikinius rutulius ir sugriebė juos iš anksto nustatytais veiksmais, gautais iš žmonių demonstracijų.
Robotas naudojo bandymus ir klaidassužinokite, kuris fiksavimas bus sėkmingas. Baigęs kamuolio treniruotę, jis bandė sugriebti įvairius daiktus, įskaitant persiką, kompiuterio pelę ir burbulinės plėvelės ritinį. Šiuose bandymuose ranka pavyko sėkmingai sugriebti 11 iš 14 objektų.
Įvairių dydžių, formų ir tekstūrų objektų fiksavimas- užduotis, kuri paprasta žmogui, bet sunki robotui. Dauguma šiuolaikinių pažangių robotų nesugeba atlikti manipuliavimo užduočių, kurias gali lengvai atlikti maži vaikai. Pavyzdžiui, žmonės instinktyviai žino, kokią jėgą reikia pritaikyti norint pakelti kiaušinį, tačiau robotui tai yra problema: jei nebus pakankamai stiprus, objektas nukris, per stiprus sulaužys kiaušinį.
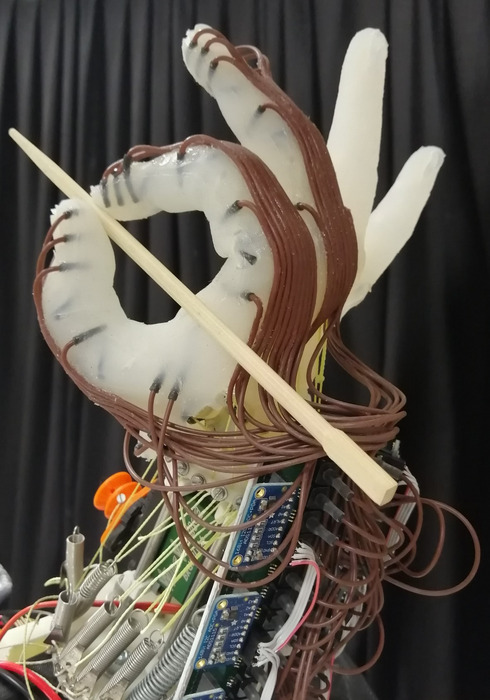 Roboto griebtuvo prototipas. Nuotrauka: Kembridžo universitetas
Roboto griebtuvo prototipas. Nuotrauka: Kembridžo universitetas
Sudėtinga technologija su motorizuotais pirštaisKiekvienai jungčiai reikia daug energijos ir daug sudėtingų ir brangių pavarų. Inžinierių pasiūlytas pasyvus sukibimas leidžia robotą daug lengviau valdyti ir daug efektyviau naudoti energiją. Tyrėjai mano, kad jų pritaikomas dizainas galėtų būti panaudotas kuriant pigią robotiką, galinčią natūralesnius judesius.
Skaityti daugiau:
Pažiūrėkite į aukščiausios raiškos Marso žemėlapį: 110 000 kadrų ir 5,7 trilijono pikselių
Kvarkų „jūra“ viename protone: iš ko susideda elementarioji dalelė
Naujas Hablo vaizdas suglumino mokslininkus
Ant viršelio: roboto griebtuvo prototipas. Nuotrauka: Kembridžo universitetas