Naujojo darbo autoriai iškėlė hipotezę, kad modeliai geriausiai mokomi naudojant numatymą
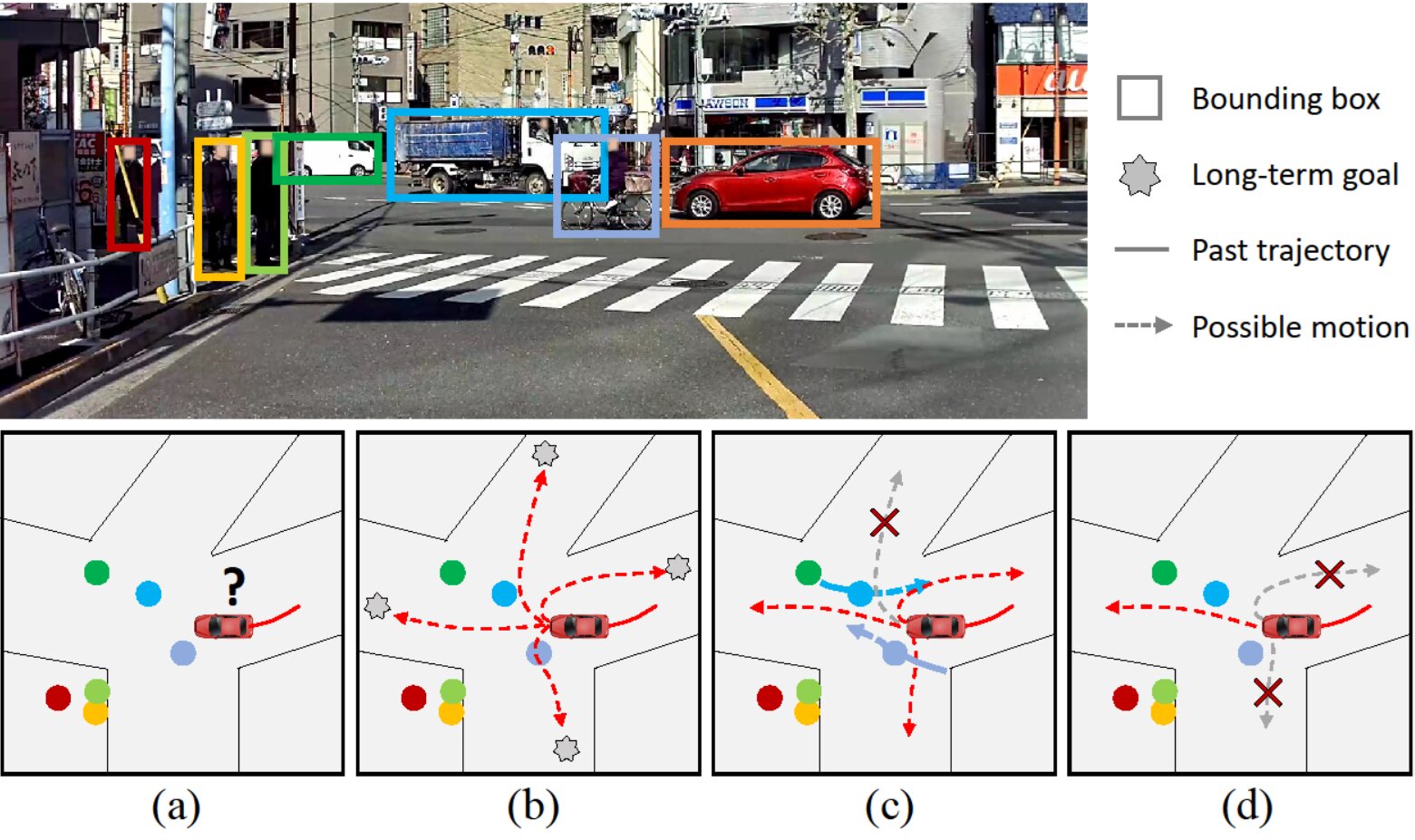
Tyrėjai planuoja sukurti architektūrą, kurioje atsižvelgiama į trumpalaikius ir ilgalaikius tikslus – tai yra pagrindiniai komponentai vertinant pėsčiojo ar automobilio ketinimus.
Pavyzdžiui, yra automobilis, kuris yra sankryžojenori pasukti į kairę. Svarbu atsižvelgti ne tik į transporto dinamiką, bet ir į tai, kaip ketinimas gali keistis priklausomai nuo įvairių veiksnių: dėl savo noro, kitų eismo dalyvių ar kliūčių.
Tada algoritmas pirmiausia užkoduoja praeities patirtį, pagal kurią modelis buvo išmokytas nuspėti, kokios gali būti ilgalaikės ir trumpalaikės pasekmės.
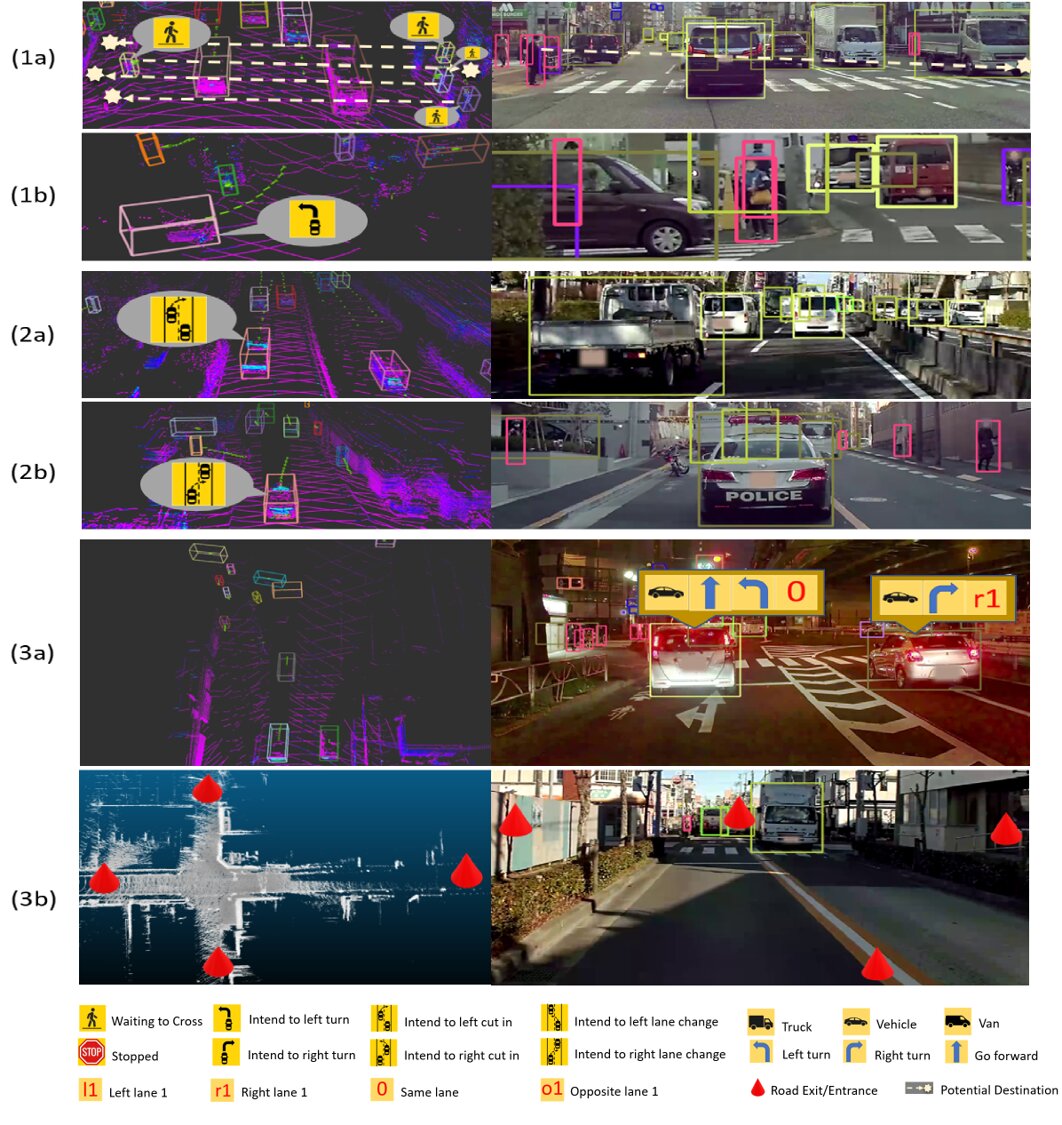
Modelis priskiriamas visiems aplinkiniams objektamsužuominos yra „ketinimai“, kurie gali keistis pakeliui, „aplinka“, pvz., kelio ženklai ir medžiai, turintys įtakos agentų ketinimams, ir „kontekstinės užuominos“, pvz., oro ir kelio sąlygos.
Tyrėjai įvertino savo modelį atlikdami daugybę bandymų ir nustatė, kad jis 27% pralenkė kitus moderniausius trajektorijos prognozavimo metodus.
Kūrėjai mano, kad modelis gali būtinaudojamas siekiant pagerinti autonominių transporto priemonių saugumą ir našumą. Be to, kitos tyrimų grupės gali naudoti LOKI duomenų rinkinį, kad parengtų savo modelius, numatančius pėsčiųjų ir transporto priemonių kelius.
Skaityti Toliau:
Nauja „iOS 15“: išleidimo data, „iPhone“ dizainas ir funkcijos. Mes pasakojame viską, kas žinoma
Itin plona medžiaga buvo pagaminta iš balto grafeno. Tai pakeis serverius
Pamatykite sunkų puolimo droną, gabenantį daugybę ginklų