"Facebook" naudos jau turimas kompiuterines regos ir natūralios kalbos apdorojimo sistemas
Planuojama, kad robotas bus visiškai savarankiškas.ir savarankiško mokymosi sistemos turi mokytis tiesiogiai iš neapdorotų duomenų. Tai leis įrenginiui greičiau prisitaikyti prie naujų iššūkių ir pokyčių aplinkybių. Dirbtinio intelekto pagrindas bus mokymasis remiantis LR modeliu, kuris leis robotams mokytis savarankiškai per bandymus ir klaidas.
Norėtume išmokyti robotą vaikščioti be pagalbos. Judėjimas yra labai sudėtinga robotikos užduotis, todėl mūsų požiūriu tai labai įdomi.
„Facebook“ mokslinių tyrimų kūrėjas Roberto Calandra
Skirtingas „Facebook“ roboto bruožasyra tai, kad prietaisas nebus įgyvendinamas jo judėjimui. Iš pradžių jis negali vaikščioti, tačiau palaipsniui naudojant mokymosi algoritmą jis pradeda bendrauti su savo valdikliais, kurie jau gali būti aktyvuoti judėjimui. Kuo daugiau patirties gauna robotas, tuo geriau jis veikia.

Šiuo atveju robotas turi ne tiknustatykite savo vietą ir orientaciją erdvėje, bet taip pat išlaikykite pusiausvyrą ir sujunkite jutiklių impulsus tarpusavyje, kad tinkamai veiktų sudėtingi mechanizmai, pvz., kelis.
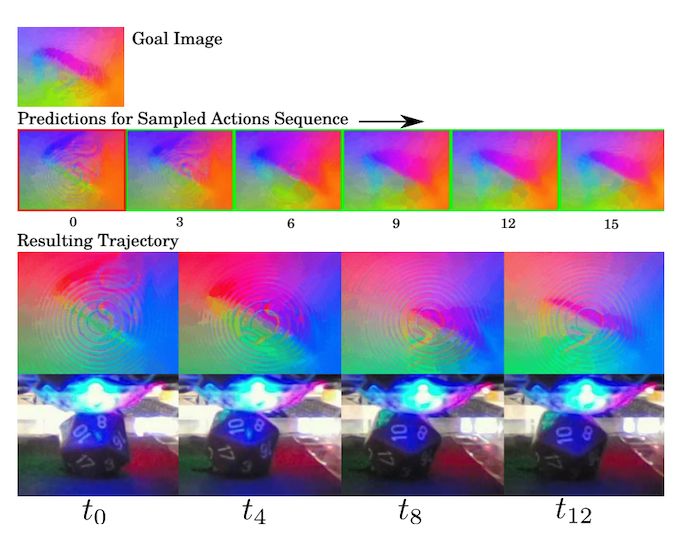
Kompiuteriniam matymui "Facebook" robotai naudoja vieną iš algoritmų, kurie buvo sukurti siekiant nuspėti vaizdo įrašų populiarumą.Neuroninis tinklas gali analizuoti kelias sekundes vaizdo įrašo ir numatyti tolesnius kadrus net jo nežiūrėdamas, kad pagreitintų didžiulio medžiagos kiekio analizę.
„Facebook“ tyrimo eksperimento dalispristatė pirmąjį prietaisą - manipuliatorių, kuris gali dirbti su vairasvirte, sukti kubelį su 20 briaunų ir teisingai suprasti rezultatus, kurie nukrito į vieną ar kitą sekundę.
Sujungus vizualius ir taktinius informacijos šaltinius, „Facebook“ gali pagerinti būsimų savarankiškų mokymosi platformų mokymosi metodus ir funkcionalumą.
Pasak kūrėjų, dabar panašūs projektai naudoja tik vieno tipo (ne daugiau du) informaciją, o visiškam robotų prietaisų veikimui jie turi suvokti informaciją iš skirtingų jutimo organų.