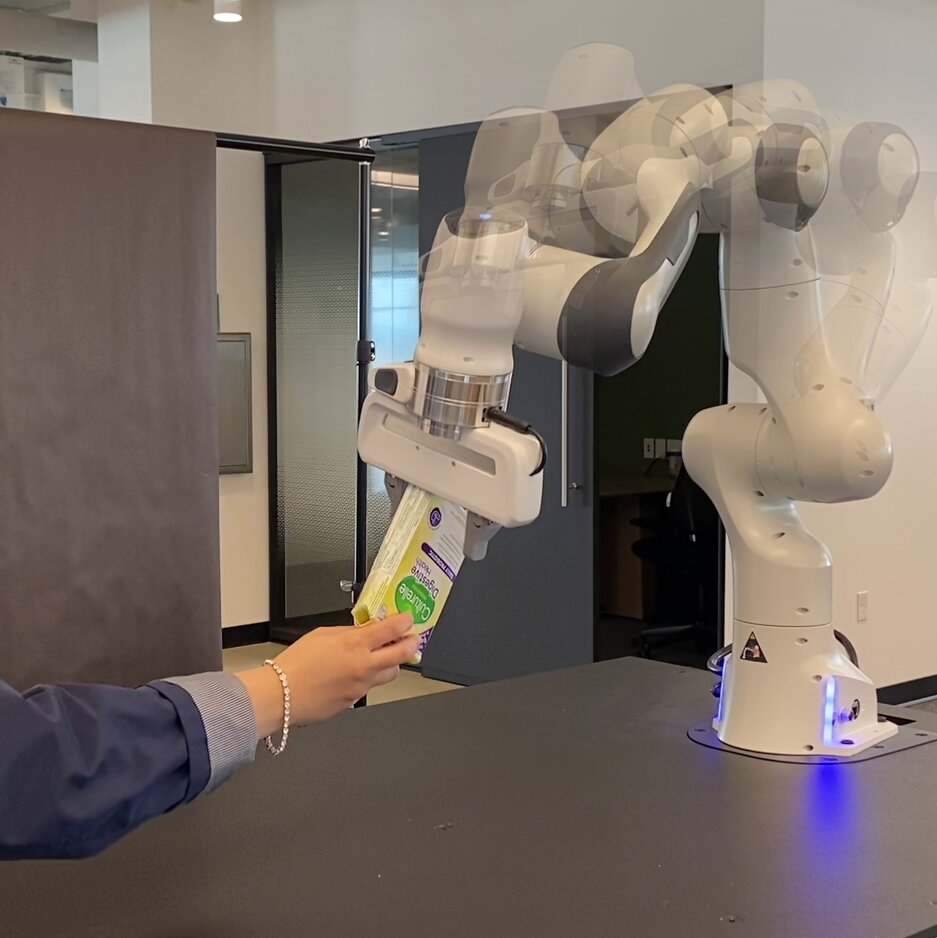
Новая модель прогнозирует, каким из способов устройство возьмет предмет из рук человека. Она определяет
«Наш подход MPC, который называется STORM, работает путем выборки множества различных возможных движений, которые робот может совершить от текущего местоположения до того места, где находится объект», — объяснил Фокс. «Он использует вычисления на графическом процессоре, чтобы оценить эти траектории. Одновременно можно проверять до 500 траекторий».
Modelis kelis kartus per sekundę atnaujina roboto sprendimus. Tai leidžia jam greitai pritaikyti suplanuotą trajektoriją ir sprendimus, kur pasiimti objektą.
Autoriai įvertino savo modelio veikimąkeli eksperimentai, kai robotai praėjo ir gaudavo įvairius daiktus bendraudami su keturiais žmonėmis. Mokslininkai darbo rezultatus pavadino sėkmingais.
Skaityti daugiau:
Jis buvo medžiojamas šimtmečius: ką mes žinome apie Vulkano planetą šalia Saulės
Astronomai netoli Žemės rado planetą: jos orbita labai keista
Nepaaiškinamas dvilypumas elementariųjų dalelių fizikoje: prie ko tai prives