Robotikų siūlomas mokymosi metodas leidžia robotui savarankiškai išmokti atlikti plaukimo manevrus.
„Savo tyrime pristatėmebiologinio pastiprinimo mokymosi valdymo metodas, skirtas imituoti povandeninių robotų judėjimą“, – sakė vienas iš kūrimo autorių Gang Chen. „Šis metodas pagrįstas vienu iš mūsų ankstesnių darbų apie bebrų judėjimą, paskelbtą Springer Link’s Journal of Intelligent & Robotų sistemos“.
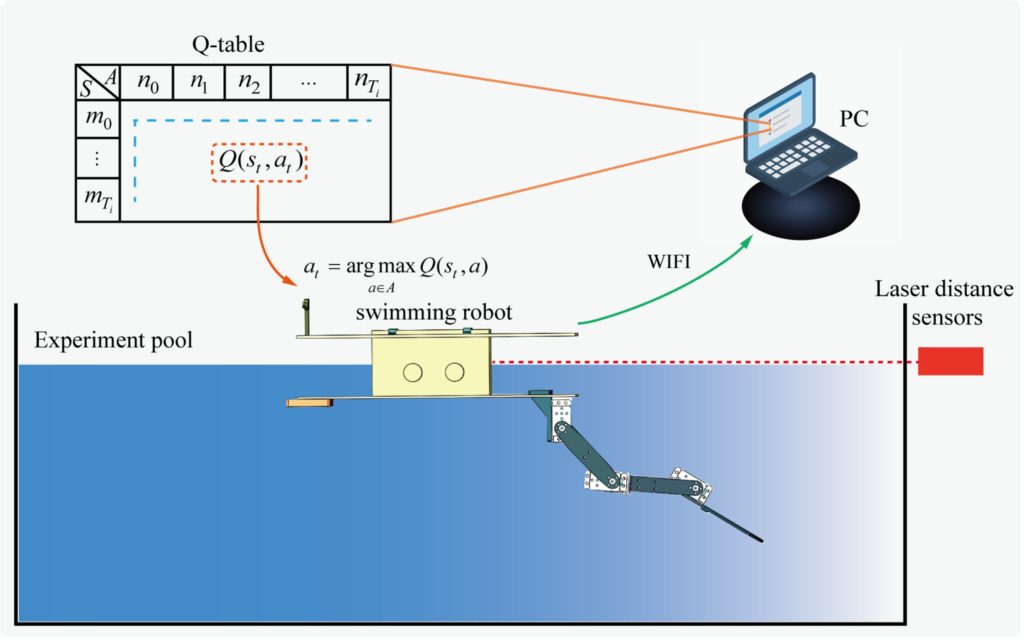 Bebro roboto mokymo principas
Bebro roboto mokymo principas
Tokie povandeniniai robotai, kaip tas, kurį sukūrė Chenas ir jokolegos yra netiesinės sistemos, o jų judesiai susiję su sudėtinga hidrodinamika. Taigi tikslus jų judėjimo modeliavimas gali būti labai sudėtinga užduotis, reikalaujanti didelių skaičiavimo išteklių.
Skirtingai nuo kitų povandeninių laivų valdymo modeliųCheno ir kolegų sukurtas robotų metodas nereikalauja sudėtingų judesių modelių, pagrįstų skysčių dinamika, integravimo. Taip yra dėl to, kad jis pagrįstas idėjų apie sąnarių, atsakingų už plaukimą bebruose, darbą supaprastinimu. Tai palengvina modelio treniruotę, taip pat sumažina neefektyvius roboto judesius treniruočių metu.
„Sujungus pastiprinimo mokymąsi sumechanizmai, kuriais grindžiamas bebrų plaukimo elgesys, mūsų metodas įgyvendina roboto plaukimo valdymą kuo greičiau ir efektyviau“, – aiškino Chenas. „Pats didžiausias pranašumas yra tai, kad išvengiama sudėtingų judesių valdymo modelių ir greitai įgyvendinamas į bebrą panašaus vienakočio roboto plaukimo valdymas.
Skaityti daugiau
Amerikiečių palydovas „pamatė“ neįprastą žinią iš Žemės
Paskelbtas vaizdo įrašas iš raketos, kuri buvo paleista iš eksperimentinio greitintuvo
Pabaisa mūsų galaktikos centre: pažiūrėkite į Paukščių Tako juodosios skylės nuotrauką