Profesorius Edwardas Andersonas iš Masačusetso technologijos instituto ir jo absolventė Sandra Liu
Rankena susideda iš dviejų lanksčių briaunuotų pirštų,kurios prisitaiko prie daikto, su kuriuo jie liečiasi, formos. Šie pirštai, kaip ir daugelis panašių gaminių, yra pagaminti iš lanksčių plastikinių medžiagų 3D spausdintuve. Tačiau savo robote inžinieriai pašalino skersinius šonkaulius, esančius vidinėje pirštų pusėje ir suteikdami jiems standumo. Vietoj to mokslininkai įdiegė kamerą ir jutiklius.
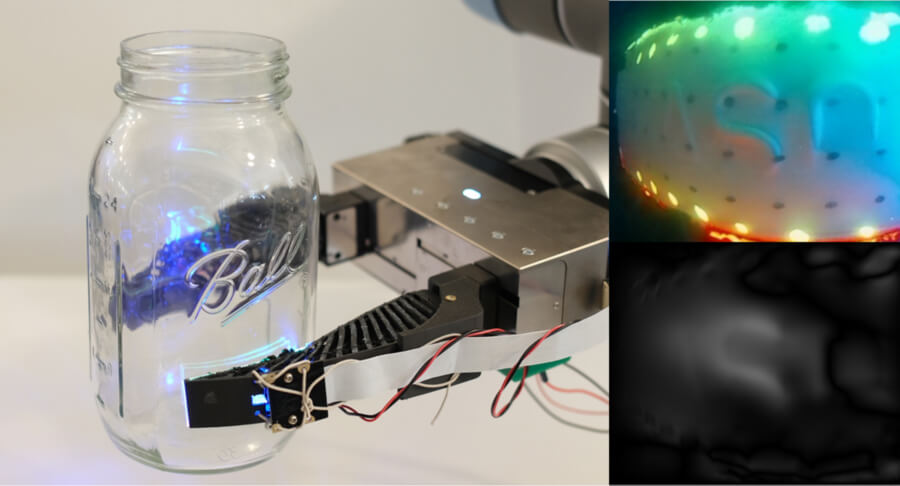
Plonasakrilo lakštas, prie kurio tvirtinamos „jautrios“ silikoninės gelio pagalvėlės. Giliai ertmėje įdėta kamera, nukreipta į akrilo sluoksnį, o visa ertmė apšviečiama šviesos diodais.
Liečiant daiktą, pirštas švelniai apsigaunajį, susiliejantį su objekto kontūrais. Kamera ir specialūs algoritmai analizuoja silikono ir akrilo lakštų kitimą. Remdamasis analize, robotas nustato bendrą objekto formą, paviršiaus nelygumus, objekto orientaciją erdvėje, jėgą, kuria reikia suspausti objektą.
Tyrėjai išbandė savoužfiksuoti, paliesdami tik vieną iš dviejų pirštų. Jų sukurtas prietaisas sėkmingai manipuliavo įvairiais objektais, tokiais kaip mini atsuktuvas, plastikinė braškė, dažų tūbelė ir vyno taurė. Tuo pačiu metu, fiksuojant braškes, vidinis jutiklis galėjo sėkmingai aptikti jos paviršiaus grūdėtumą, o dirbant su stiklainiu – nuskaityti išgraviruotą pavadinimą.
 Šaltinis: MIT kompiuterių mokslo ir dirbtinio intelekto laboratorija
Šaltinis: MIT kompiuterių mokslo ir dirbtinio intelekto laboratorija
Kaip pastebi darbo autoriai, stiklo objektaiyra iššūkis kompiuteriniams regėjimo jutikliams dėl šviesos lūžio. Lytėjimo jutikliai leidžia apeiti šį apribojimą. Kai rankena pakėlė stiklą, jis pajuto koto orientaciją erdvėje ir galėjo įsitikinti, kad stiklas nukreiptas į viršų, prieš nuleisdamas jį ant stalo.
Inžinieriai pažymi, kad viduje sukuriama ertmėpirštas šiek tiek sutrikdė rankenos stabilumą. Mokslininkai planuoja patobulinti savo prietaiso dizainą, kad ištaisytų šį trūkumą. Be to, jie planuoja sukurti trijų pirštų rankeną, kuri galėtų, pavyzdžiui, paimti vaisių gabaliukus ir įvertinti jų brandą.
Skaityti daugiau:
MIT sukuria stacionarų šilumos variklį, kuris pranoksta turbinas
Po dešimties metų darbo mokslininkai suabejojo standartiniu fizikos modeliu
Pažiūrėkite, kaip saulėtekis atrodo Marse