Kas yra minkštieji robotai?
Minkštoji robotika yra ypatinga robotikos sritis, susijusi su
Minkšta robotika daugiausia priklauso nuokaip gyvi organizmai juda ir prisitaiko prie savo aplinkos. Skirtingai nei robotai, pagaminti iš standžių medžiagų, minkštieji robotai suteikia didesnį lankstumą ir pritaikomumą atlikti užduotis, taip pat padidina saugumą dirbant su žmonėmis. Šios savybės leidžia jį naudoti medicinoje ir pramonėje.
Minkšta robotika daugiausia kuriarobotai, pagaminti tik iš minkštų medžiagų. Todėl gauti robotai atrodo kaip bestuburiai, pavyzdžiui, kirminai ar aštuonkojai. Imituoti tokių robotų judėjimą yra nelengva užduotis. Faktas yra tas, kad tokiems procesams būtina taikyti kontinuumo mechanikos metodus. Štai kodėl minkštieji robotai kartais vadinami tęstiniais robotais.
Kontinuumo mechanika yra mechanikos, kontinuumo fizikos ir kondensuotos medžiagos fizikos šaka, skirta dujinių, skystų ir deformuojamų kietųjų dalelių judėjimui, taip pat jėgos sąveikai tokiuose kūnuose.
Minkštų ir kietų robotų hibridai
Norėdami ištirti biologinius reiškinius, mokslininkai sukuria minkštus robotus pagal gyvų organizmų atvaizdą ir atlieka eksperimentus, kuriuos sunku atlikti su realiais organizmais.
Tačiau yra standžių robotų, kurie taip pat gali nuolat deformuotis, pavyzdžiui, gyvatės robotas.
Minkštos konstrukcijos gali būti naudojamos kaip dalisdidesnis standus robotas. Robotiniai minkštieji efektoriai, skirti daiktams suimti ir manipuliuoti, suteikia pranašumą. Esmė ta, kad jie nesunaikina trapių daiktų.
Taip pat galima sukurti hibridinį minkštą ir kietąrobotai, turintys vidinį standų rėmą ir išorinius minkštus elementus. Minkšti elementai gali atlikti daug funkcijų: tiek veikimo mechanizmus, panašius į gyvūnų raumenis, tiek amortizuojančią medžiagą, kad būtų užtikrintas saugumas susidūrus su žmonėmis.
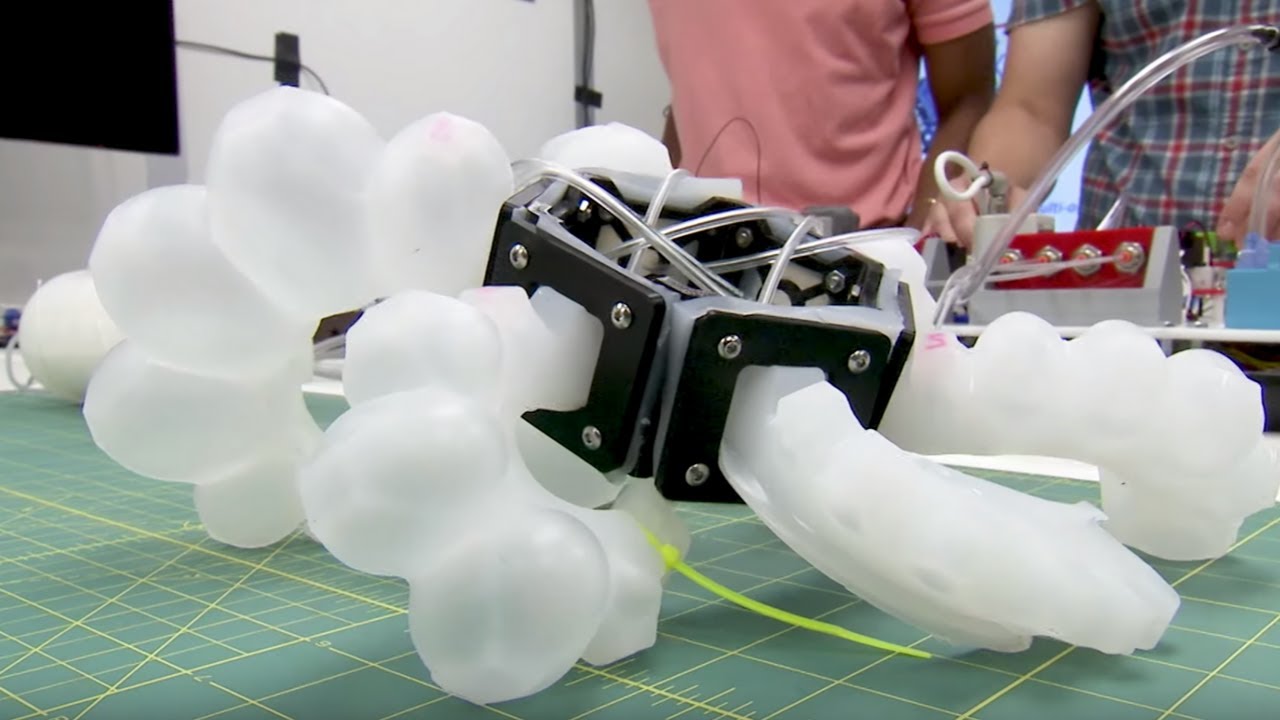
 Ratuotas robotas minkštomis kojomis ir galimybe judėti ant žemės.
Ratuotas robotas minkštomis kojomis ir galimybe judėti ant žemės.
Nuotrauka: Ali Sadeghi, Alessio Mondini, Emanuela Del Dottore, Anand Kumar Mishra ir Barbara Mazzolai
Minkštus robotus galima sulenkti į bet kokią formąforma. Jie pagaminti iš labai minkštos medžiagos, įskaitant nanomedžiagas. Dėl to jie panašesni į žmogaus kūno dalis, pavyzdžiui, raumenis. Tiesą sakant, galima sakyti, kad šie robotai beveik atgyja nanomedžiagų pagalba.
Nepaisant daugybės tyrimų minkštųjų robotų srityje, inžinieriai vis dar tik pradeda savo kelionę. Tačiau ekspertai prognozuoja, kad iki 2024 metų jų rinka pasieks 2,16 mlrd.
Kuo minkštieji robotai skiriasi nuo paprastų robotų?
Metaliniai robotai yra daug ribotesni. Jie buvo pastatyti atsižvelgiant į greitį ir tikslumą, todėl jie idealiai tinka tokiems dalykams, kaip konvejerio darbai. Bet jie nėra tokie universalūs.
Minkštieji robotai skiriasi nuo pramoninių arrobotai, nes jų konstrukcija pagaminta iš minkštų, lankstių medžiagų. Jų dizainas labai skiriasi nuo bet kurios kitos formos robotų, o panašiai minkšti robotai atlieka labai skirtingas funkcijas.
Dauguma minkštųjų robotų vis dar yrapradiniame vystymosi etape, o patį pirmąjį minkštą robotą 2011 m. sukūrė Harvardo profesorius George'as Whitesidesas. Nuo tada minkštųjų robotų skaičius ir tipai labai išaugo. Nors jų realus komercinis perspektyvumas gali būti nutolęs kelerius metus, jie vis tiek yra įdomi technologija, turinti didelį potencialą.
„Soft robotai“ - įdomi naujovė pasaulyjerobotika. Pirmiau išvardyti penki minkštųjų robotų tipai gali turėti didžiausią komercinį potencialą iš visų šiuo metu kuriamų minkštųjų robotų tipų.
Skirtingai nuo pramoninių ar bendradarbiaujančių robotų, minkštieji robotai naudojami įvairiausiose srityse.
Kaip naudojami minkštieji robotai?
Minkštųjų robotų patrauklumas slypi jų lankstume ir universalume.
6 perspektyvūs minkštųjų robotų tipai
Yra daug įvairių minkštųjų robotų tipų, tačiau yra 6 skirtingos programos, žadančios didžiausią komercinį potencialą.
- Robotiniai raumenys: šiuo metu kuriami keli tipaiminkšti robotai, kurie veiks kaip robotiniai raumenys. Vienas iš perspektyviausių prototipų įkvėpimo semiasi iš origami. Jo sulankstyta konstrukcija gali pakelti 1000 kartų didesnį svorį nei pati, o ilgis – nuo kelių milimetrų iki metro. Be to, dabar mokslininkai kuria nanoskalės robotus iš DNR.
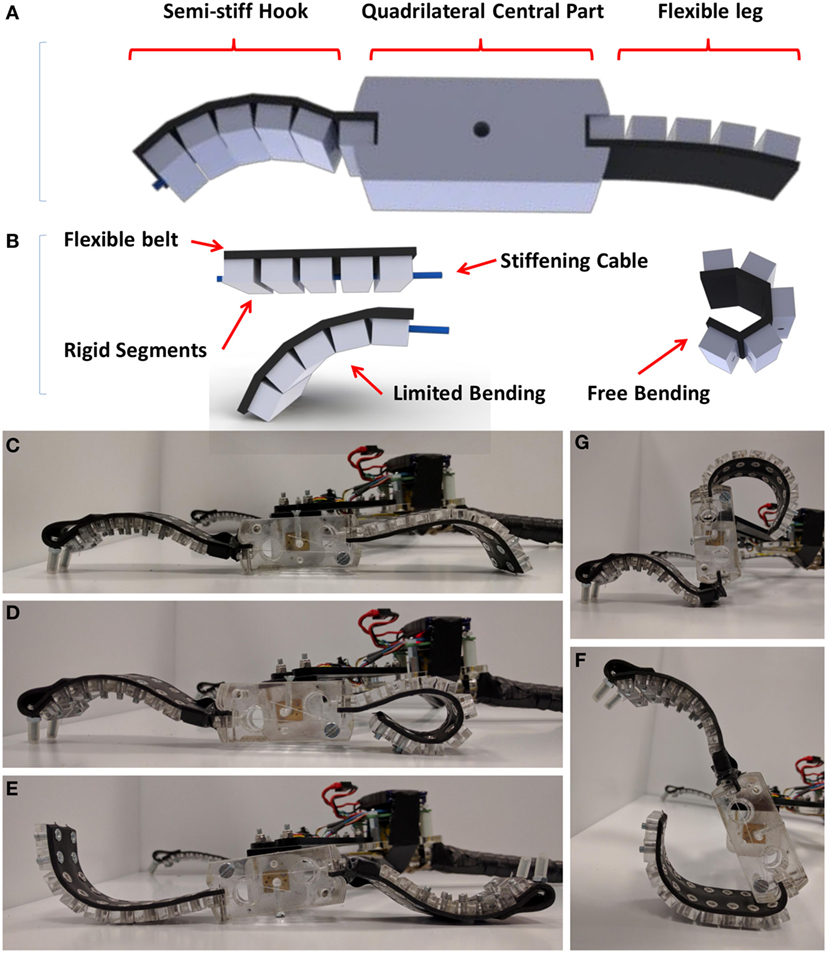
- Laipiojantys robotai:tokio tipo robotai turi daug galimybiųnuo statybų tikrinimo ir priežiūros iki paieškos ir gelbėjimo operacijų. Vienos minkštų laipiojimo robotų versijos yra išlenktos, labai panašios į vikšrą. Tai leidžia jam nuskaityti skirtingo dydžio struktūras aukštyn ir žemyn.
- Valgomieji robotai. Pirmasis tokių robotų projektas sukūrė mokyklos komanda Filadelfijoje kasmetinėms „Soft Robotics“ varžyboms. Šie biologiškai skaidomi robotai gali saugiai pristatyti vaistus į įvairias kūno vietas.
- Nešiojami robotai.Šie biomimetikos prietaisai gali padėtipacientas, kuriam atliekama fizinė reabilitacija. Minkštas robotas imituoja natūralų kūno judėjimą, kad ir kur jis būtų, padėdamas pacientui atkurti normalią motorinę funkciją.
- Protezuojantys robotai.Kuriant galima naudoti minkštus robotusgeresnis protezavimas žmonėms, kuriems trūksta galūnių ar kūno dalių. Dažnai minkštosios robotikos technologija yra naudojama protezuotos rankos gale, siekiant subtiliau ir tiksliau sugriebti objektus.
- Astronautų robotai. NASA mokslininkai teigia, kad vieną dieną jie skris Marso paviršiumi. Kiti jau kuria robotus, kurie dirbs sunkiausiai pasiekiamose žmogaus kūno vietose.
Nors minkštieji robotai taip pat gali būti naudojamipramoninė aplinka - ypač kaip robotai (dar vadinami „kobotais“), dirbantys su žmonėmis, vargu ar tuo apsiriboja.
Pirmasis pasaulyje minkštas autonominis robotas
2016 m. Harvardo mokslininkai naudojoskysta silikoninė guma, skirta Octobot – pirmojo pasaulyje minkšto autonominio roboto – kūrimui. Įkvėpti aštuonkojų, šie minkšti robotai gali suktis ir įveikti kliūtis, kurių gali neįmanyti aštrūs, standūs metaliniai robotai, tokie kaip pavaizduoti „Terminatoriuje“ ar „Žvaigždžių karuose“.
Keista, kad „Octobot“ yra pigiau gaminti,nei latte, o kuro papildymas kainuoja tik 5 centus. Galima įsivaizduoti, kad šimtai pigių robotų yra siunčiami ištirti įvykio vietos, įveikti kliūčių ir kliūčių, kad būtų lengviau vykdyti gelbėjimo operaciją.
„Pagrindinis minkštosios robotikos tikslas nėra kurtiypač tikslios mašinos, nes mes jas jau turime “, - sakė biomedicinos inžinierė Jada Gerboni savo 2018 m. TED kalboje. - Ir kad robotai galėtų atlaikyti netikėtas situacijas realiame pasaulyje “.
Minkštieji robotai medicinoje
Minkštieji robotai gali būti naudojami kaipchirurginiai ir medicinos prietaisai (ypač endoskopai). Jų pranašumas yra tas, kad jie per kūno struktūras juda lengviau nei gali tradiciniai instrumentai. Tai suteikia gydytojams aiškesnį vaizdą apie paciento kūno plotą, kurį jie nori ištirti.
Visiškai minkšti robotiniai drabužiai, galintys padėti žmonėms judėti, yra vienas žingsnis arčiau tikrovės, sukūrus naują lanksčią ir lengvą minkštos robotikos energijos sistemą.
Atradimą padarė komanda iš BristolioUniversitetas galėtų atverti kelią nešiojamiems pagalbiniams prietaisams žmonėms su negalia ir tiems, kurie kenčia nuo su amžiumi susijusių raumenų degeneracijos. Tyrimas buvo paskelbtas šiandienMokslo robotika.
 Naujas plonas ir lengvas kreditinės kortelės dydžio siurblys. Autorius: Timas Helpas, Bristolio universitetas.
Naujas plonas ir lengvas kreditinės kortelės dydžio siurblys. Autorius: Timas Helpas, Bristolio universitetas.
Minkštieji robotai yra pagaminti iš lanksčių medžiagų,kuris gali išsitiesti ir pasisukti. Šios medžiagos gali būti naudojamos dirbtiniams raumenims gaminti, kurie susitraukia, kai į juos pumpuojamas oras. Šių raumenų minkštumas leidžia naudoti atraminius drabužius. Tačiau iki šiol šiuos pneumatinius dirbtinius raumenis varė įprasti elektromagnetiniai (varikliniai) siurbliai, kurie yra didelių gabaritų, triukšmingi, sudėtingi ir brangūs.
„Bristol SoftLab“ tyrėjaiir Bristolio robotikos laboratorija, vadovaujama robotikos profesoriaus Jonathano Rossiterio, sėkmingai parodė naują elektropneumatinį siurblį, kuris yra minkštas, lankstus, nebrangus ir lengvai pagaminamas.
Straipsnyje komanda aprašo, kaip naujas minkštasKreditinės kortelės dydžio siurblys gali vairuoti dirbtinius raumenis su oro pūsle ir pumpuoti skysčius. Komanda taip pat apibūdina savo tolesnius žingsnius, kaip galingus drabužius paversti realybe.
Lygiai taip pat anglies pagrindu pagaminti titano polimeraigali būti naudojamas kartu su sintetiniais polimerais, norint sukurti itin plonus dirbtinius raumenis. Ši technologija buvo pristatyta šokių drugelių, plazdančių lapų ir žydinčių gėlių meno reprodukcijose Korėjos pažangiame mokslo ir technologijos institute.
Kaip veikia minkštieji robotai?
Minkšti robotai, specialiai sukurtigyvenimo imitacijos, dažnai turi patirti ciklinį stresą judant ar atliekant bet kokią kitą užduotį. Pavyzdžiui, aukščiau aprašyto avinėlio ar sepijos tipo roboto judėjimui reikės vandens elektrolizės ir dujų uždegimo, dėl ko robotas būtų greitai išplėstas. Šis pasikartojantis ir sprogstamasis išsiplėtimas ir susitraukimas sukurs intensyvią ciklinę apkrovą pasirinktai polimerinei medžiagai. Europą po vandeniu esančio roboto būtų beveik neįmanoma pataisyti ar pakeisti, todėl reikia pasirūpinti medžiaga ir konstrukcija, kuri kuo labiau sumažintų nuovargio įtrūkimų atsiradimą ir plitimą. Visų pirma, medžiaga turėtų būti parinkta su ištvermės riba arba įtempio amplitudės dažniu, kurį viršijus polimero nuovargio charakteristika nebepriklauso nuo dažnio.
Kadangi minkšti robotai yra pagaminti iš minkštųjųmedžiagų, turi būti atsižvelgta į temperatūros poveikį. Medžiagos takumo įtampa linkusi mažėti priklausomai nuo temperatūros, o polimerinėse medžiagose šis poveikis yra dar ryškesnis. Kambaryje ir aukštesnėje temperatūroje ilgos daugelio polimerų grandinės gali išsitiesti ir slinkti viena kitai, užkertant kelią vietos įtempių koncentracijai vienoje srityje ir paverčiant medžiagą plastine. Tačiau daugumoje polimerų vyksta permaininga – trapi perėjimo temperatūra, žemiau kurios nepakanka šiluminės energijos, kad ilgos grandinės galėtų taip reaguoti, ir sunaikinimas yra daug labiau tikėtinas. Manoma, kad polimerinių medžiagų trapumas esant žemesnei temperatūrai yra „Challenger“ šaudyklės katastrofos priežastis ir į ją turėtų būti žiūrima labai rimtai, ypač dėl minkštųjų robotų, kurie bus pristatyti medicinai. Plastiška iki trapios perėjimo temperatūra nebūtinai turi būti laikoma „šalta“ ir iš tikrųjų yra pačios medžiagos savybė, atsižvelgiant į jos kristališkumą, kietumą, šoninių grupių dydį (polimerų atveju) ir kitus veiksnius.
Technologijos trūkumai
Minkšti robotai neapsieina be trūkumų.Konkrečiai, mokslininkai išsiaiškino, kad skysčių pavaros – įrenginiai, kurie iš tikrųjų animuoja robotus – lėtai įsijungia dėl didelio skysčio kiekio, reikalingo judėjimui, arba dėl to, kad jų srautą lėtina įvairios įrenginyje esančios struktūros (pvz., vamzdeliai ir vožtuvai). ).
Tačiau Harvardo mokslininkai vystosiapeitis. Pažymėdami, kad tokių žaislų lenkimas atleidžia daug energijos, jie suprojektuoja pavaras su dviem išlenkiamais dangteliais, vienas kito viduje. Pripūtus išorinį dangtelį, slėgis padidėja į vidinį dangtelį. Kai jis pasilenkia, išsiskyrusi energija prietaisas juda.
Minkštieji robotai turi tą potencialątęsiasi iki Marso ir atgal, ir jie, be abejo, ateinančiais metais taps didele visuomenės dalimi. Jų galimybes riboja tik žmogaus vaizduotė.
Minkštieji robotai ir žmonės
Minkšto kūno robotai suteikia galimybęsocialinė ir taktilinė žmonių ir robotų sąveika, kuriai reikia atidžiai apsvarstyti netinkamų emocinių prisirišimų galimybę ir asmeninį bei socialiai destruktyvų vartotojų elgesį. Etiniai klausimai, susiję su žmogaus ir roboto sąveika ir kaip jie turėtų prisidėti kuriant minkštą robotiką socialinės sąveikos kontekste, aptariami žurnalo „Soft Robotics“ straipsnyje.
Thomas Arnoldas ir Matthiasas Schoitzas, Tufto universitetas,Medfordas, Masačusetsas, kartu su straipsniu „Minkštosios robotikos taktilinė etika: protingas žmogaus ir roboto sąveikos dizainas“. Jie nagrinėja platų temų spektrą, įskaitant „soft robotų“ gebėjimą prisiliesti prie aplinkos ir sąveikauti su jomis, galimą riziką, atsirandančią dėl žmogaus vienpusių emocinių ryšių su robotais užmezgimo, ir kokiems socialiniams robotams turėtų būti sukurta. Norėdami iliustruoti kai kurias su minkšta robotika susijusias etines problemas ir galimą riziką visuomenei, autoriai aptaria sekso robotų pavyzdį.
Arnoldas ir Schoitzas siūlo tris įprastusminkštosios robotikos kūrimo principas socialinio asmens ir roboto kontekste. Jie skatina minkštosios robotikos bendruomenę spręsti šias etines problemas kaip būdą pagerinti žmogaus ir roboto sąveikos kokybę ir efektyvumą. „Švelni robotų technologija greitai atneš mašinas, kurios tiesiogiai sąveikauja su žmonėmis; svarbu pradėti galvoti apie jų poveikį socialinėms situacijoms. Šiame straipsnyje aprašomi keli pagrindiniai klausimai ir pateikiamos puikios rekomendacijos rimtai aptarti žmogaus ir roboto santykius “, - apibendrina Barry A. Trimmeris, daktaras, vadovaujantis Neuromechanikos ir biomimetikos prietaisų laboratorijai Tuftso universitete Medforde, Masačusetse. .
Taip pat skaitykite
Buvo sukurtas pirmasis tikslus pasaulio žemėlapis. Kas negerai visiems kitiems?
Pažvelkite į Hablo planetinių ūkų nuotraukas.
Fizikai sukūrė juodosios skylės analogą ir patvirtino Hawkingo teoriją. Kur jis veda?