Pavadinimas Dyret (norvegiškai „gyvūnas“) yra „Dynamic Robot for Embodied Testing“ akronimas.
„Mes parodėme buvimo naudąrobotas gali nuolat pritaikyti savo kūno formas. Mūsų robotas įrodo, kad tai lengva padaryti naudojant šiuolaikines technologijas “, - aiškina Tonnesas Nygaardas, UiO Kompiuterijos katedros vyresnysis lektorius.
Daireto atveju kūno pertvarkymas reiškia, kad jis reguliuoja kojų ilgį. Kūno formos pritaikymo mechanizmas pasirodė esąs labai naudingas robotui.
Mokslininkai anksčiau įrodė, kad jų robotas prisitaikoį įvairias aplinkas kontroliuojamomis patalpų sąlygomis. Tada Nygaardas šešis mėnesius praleido su kolegomis inžinieriais Sandraugos mokslo ir pramonės tyrimų organizacijoje (CSIRO) Australijoje. Ji specializuojasi savarankiškai besimokančių robotų bandymuose lauke.
„Anksčiau manyta, kad tai per sunkupasiekti realiame pasaulyje. Robotų pagalba ir savo eksperimentais parodėme, kad tai įmanoma“, – interviu Titan.uio.no aiškina Nygaard. Darbo rezultatai buvo paskelbti žurnaleGamtos mašinų intelektas.
Keičiant kojų ilgį, robotas galiautomatiškai pakeisti kūno formą. Morfologiškai prisitaikantys robotai gali veikti nenuspėjamoje aplinkoje ir susidurti su naujais iššūkiais, nereikėdami pertvarkyti savo struktūros ar atstatyti kiekvieną kartą, kai susiduria su kažkuo netikėta.
Žmonėms sunku įsivaizduoti, kaip sunku robotui judėti, pavyzdžiui, nuo betono iki žolės. Nepamirškite, kad žmogus turi ilgametę patirtį ir gana daug jausmų, palyginti su robotu.
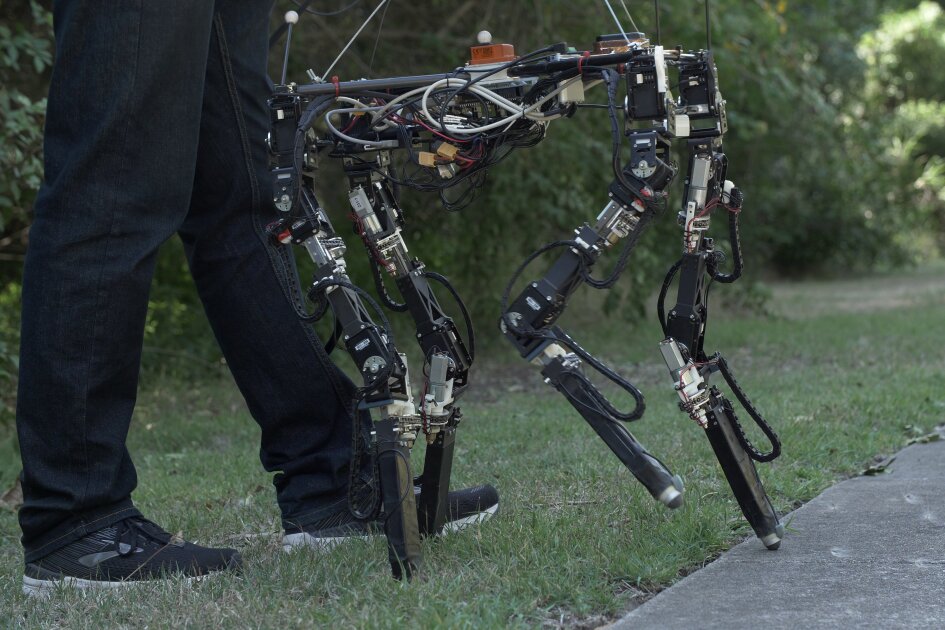 Nuo žolės iki betono: milžiniškas savarankiško mokymosi roboto šuolis. Autorius: Tønnes Nygaard / UiO.
Nuo žolės iki betono: milžiniškas savarankiško mokymosi roboto šuolis. Autorius: Tønnes Nygaard / UiO.
„Robotas naudoja kamerą, kad pamatytųkaip nelygus reljefas ir kojų jutikliai, kad būtų galima nustatyti, kaip sunku vaikščioti paviršiumi, paaiškina Nygaard. "Diretas nuolat mokosi apie aplinką, kuria eina, ir kartu su žiniomis, gautomis uždarose patalpose kontroliuojamoje aplinkoje, jas panaudoja savo kūnui pritaikyti."
Kai Diret paprašė vaikščioti ant žolės, jisdar niekada nematė žolės. Jis treniravosi tik žvyrą, smėlį ir betoną. Tačiau jis greitai išmoko vaikščioti ant Australijos žolės ir koks buvo idealus kojos ilgis. Buvo nustatyta, kad trumpesnės kojos užtikrina geresnį roboto stabilumą, o ilgesnės - didesnį ėjimo greitį, jei žemė yra pakankamai nuspėjama.
Plokščia veja gali būti ne pati didžiausiaproblema, tačiau gamtoje žolė yra pilna kuokštų ir skylių, kurios gali užstrigti ilgakojį robotą, todėl Dairet sutrumpina kojas. Ant betono jis gali juos ištraukti ir „pabėgti“.
Robotas taip pat prisitaiko prie žalos, pataikydamas į nenumatytas kliūtis.
„Naudodamas mūsų technologijas, robotas galiprisitaikyti prie vienos iš kojų silpnėjimo arba lūžio. Jis gali išmokti atsigauti šlubuodamas arba sumažindamas kitų trijų kojų ilgį“, – sako Nygaard. Mokydamasis iš savo klaidų ir gedimų, Dayretas geriau prisitaiko prie savo aplinkos.
Kol Dairetas nebus pasirengęs imtis rimtų problemųužduotys. Nygaardo daktaro laipsnio tikslas buvo sukurti technologijas ir rasti tinkamas medžiagas bei įrodyti, kad tai įmanoma. Tačiau jis mato keletą galimų panaudojimo būdų ateityje. Pavyzdžiui, robotas yra naudingas atliekant paieškos ir gelbėjimo darbus, taip pat žemės ūkyje, kur yra daugybė sudėtingų paviršių ir oro sąlygų. Be to, „Dairet“ padės tirti minas, į kurias sunku patekti.
Skaityti daugiau
Fizikai sukūrė juodosios skylės analogą ir patvirtino Hawkingo teoriją. Kur jis veda?
Uranas gavo keisčiausios Saulės sistemos planetos statusą. Kodėl?
„SuperCam“ mokslinis instrumentas iš „Perseverance rover“ siunčia pirmuosius rezultatus į Žemę