Kas yra robotai?
Prieš kelerius metus „Reddit“ pasirodė šaunus dalykas – mokslininkai apibūdino kompleksą
Robotika yra taikoma sinergetinė priemonėveiklos sritis. Jį sudaro programavimas, mechatronika ir kibernetika. Mechatronika yra kažkas, kas sąveikauja su realiu pasauliu. O kibernetika yra kelių grandžių mokslas, apimantis visų pirma sukurtų programų valdymą.
Kas yra robotas?Prieš 15 metų daugelis būtų sakę, kad tai robotinė ranka, kuri dirba gamykloje ir atlieka suvirinimą ar dažymą. Kitas populiarus atsakymas – android robotas iš kino pasaulio. Bet ar judantis vežimėlis ar nepilotuojama transporto priemonė yra robotas? Taip, tai irgi viena iš robotikos sričių. Orlaiviai taip pat yra robotai, kai kurie iš naujausių pasiekimų apima išmaniąsias technologijas ir iš tikrųjų yra autonominiai robotai.
 Mobilus vežimėlis taip pat yra robotas
Mobilus vežimėlis taip pat yra robotas
Taip pat yra tokia robotikos sritis kaip laukasrobotika – „mobilioji robotika“. Tai apima visus robotus, kurie juda lauke, pastate ar po vandeniu. Įdomiausias pritaikymas, mano nuomone, yra žemės ūkis.
Lėktuvų istorija
Lėktuvų istorija prasidėjo praeityjeamžiaus. Prieš tai skrisdavo tik oro balionai be variklio, o juos pavadinti robotais buvo sunku. Praėjusio amžiaus pradžioje veikė dviejų tipų orlaiviai – dirižabliai ir lėktuvai. Pirmąjį kontroliuojamą skrydį atliko broliai Wrightai. Be to, pirmasis autopilotas pasirodė gana greitai, praėjus beveik 10 metų, jis padėjo stabilizuoti skrydį.
Dabartinė robotikos kryptis yra susijusi sunaujų atvirų autopilotų, tokių kaip PixHawk, kūrimas ir prieinamumas (PixHawk yra atvira aparatinė įranga, skirta valdikliams, dronams ir kitiems UAV. Ji naudojama akademiniais, mėgėjų ir profesionaliais tikslais). Dronų atėjimo į kiekvieno žmogaus gyvenimą pavyzdys yra „Dodo Pizza“ kompanijos kartu su „Copt Express“ pristatyta pica – tai įvyko 2014 m.
 Lėktuvų istorija
Lėktuvų istorija
Kaip valdomas dronas
Šiuolaikiniai orlaiviai naudoja vienąiš trijų kėlimo principų – aerostatinis, reaktyvinis arba aerodinaminis. Aerodinaminis skrydžio principas ir keltuvo sukūrimas (numetant dalį oro) gali būti įgyvendintas arba dėl viso aparato, turinčio fiksuotą atraminį paviršių (sparną), judėjimo, arba dėl atskirų guolių dalių judėjimo. aparato (pagrindinio rotoriaus, ventiliatoriaus) oro atžvilgiu.
 Kaip prietaisai skraido
Kaip prietaisai skraido
Dronas turi propelerį, kuris sukuria pakėlimą.Atsikėlęs nuo žemės, prietaisas ima greičiau judinti propelerį ir kyla aukštyn. Tačiau veiksmo jėga lygi reakcijos jėgai. Kai sraigtas sukasi, sukuriamas momentas priešinga kryptimi – tokia yra sraigtasparnių ir kopterių konstrukcija. Jei sraigtasparnis turi vieną propelerį, jis nebus stabilus. Todėl įrenginyje naudojama arba dviejų rotorių schema, arba uodeginis rotorius.
Keturkopterio konstrukcija yra labai paprasta -Paprastai jis turi keturis varžtus, iš kurių du sukasi viena kryptimi, o du – kita kryptimi. Jei naudotojui reikia judėti į priekį, kai kurie sraigtai sukasi lėčiau, o kiti sukasi greičiau. O jei vartotojas nori pasukti, kai kurie įstrižai įstatyti varžtai įsibėgėja, o kiti sulėtina.
 Kaip skrenda keturkopteris
Kaip skrenda keturkopteris
Kopterio judesiai kampuose yra susiję su judėjimu išilgaikoordinates. Jei pilotas nori judėti į priekį, pirmiausia turime pakreipti droną į priekį, o tada, kai elektrinis įrenginys traukiasi į priekį, stabilizuoti jį toje vietoje, kur norime likti.
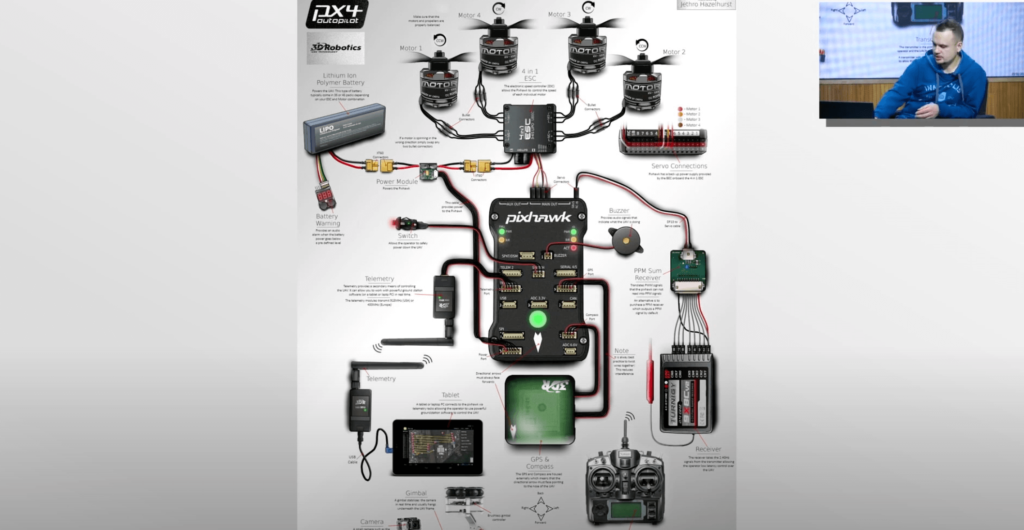
Tai yra vieno iš populiariausių autopilotų diagrama,kurių pagrindu gali būti pagaminti nauji įrenginiai. Jis jungiasi prie visų variklių ir jutiklių. Be to, varikliai turi savo valdymo bloką, ESC reguliatorių - Elektroninį greičio reguliatorių, kuris valdo variklio greitį.
Iš jutiklių yra GPS, kad dronas galėtųdirbti lauke, skristi į taškus ir stabilizuoti padėtį. Tačiau pačiame autopiloto viduje taip pat yra IMU – inercinis jutiklio modulis, leidžiantis nustatyti posūkio kampus. Taip pat yra ryšio kanalas, antžeminė valdymo stotis ir baterija.
 UAV įrenginys
UAV įrenginys
Kaip minėta aukščiau, yra lygisvariklio valdymas - mes, nedvejodami, galime nustatyti sukimosi greitį. Kiti lygiai veikia tuo pačiu principu: kitas yra orientacijos valdymas.
Bet pirmiausia turime kontroliuoti sukimosi greitį– FPV kopteriai skraido šiame lygyje (įrenginiai, leidžiantys žiūrėti vaizdą iš drono kameros realiu laiku iš pirmo asmens (FPV – First Person View). Patyrę pilotai nustato sukimosi greitį ir nuolat vairavo vairasvirte. Kitas etapas yra tada, kai vartotojas gali stabilizuoti kampą, bet dronas vis tiek judės. Kitas yra greičio valdymas, o aukščiausias yra padėties valdymas, manevrai norint judėti į tašką arba judėti tam tikra trajektorija.
Norintys programuoti, statyti irvaldymo dronų – reikėtų atkreipti dėmesį į PIX4 atvirojo kodo autopilotą. Aplink oro robotiką (ROS – robotinė operacinė sistema, arba Open robotika) yra visa bendruomenė, yra bepiločių orlaivių simuliatoriai. Todėl daug eksperimentų galima atlikti simuliatoriuje neturint paties drono.
Drono kūrimo etapai
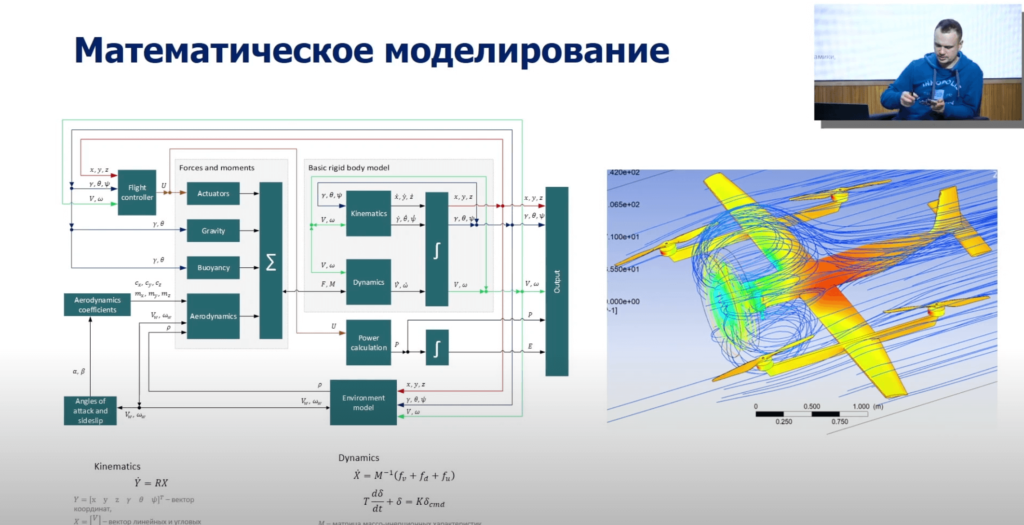
Tyrėjai pradeda nuo konceptualausmodeliavimas, o tada jiems reikia sukurti tikslų aparato modelį. Nesigilinant į formulę, kopterio modelis iš esmės yra standus kėbulo modelis. Tai antrasis Niutono dėsnis, taikomas dalelių sistemoms. Jis turi transliacinį ir sukamąjį judesį, yra judėjimo kinematika ir dinamika, o norėdami apibūdinti konkretaus įrenginio modelį, čia turime pridėti jėgų, veikiančių konkretų droną, lygtį.
 Kaip modeliuojami UAV
Kaip modeliuojami UAV
Kitas žingsnis – sistemos kūrimasvaldymas. Jei einame klasikiniu keliu: pirmiausia išsiaiškiname tikslų matematinį modelį ir jo pagrindu jau sintezuojame valdymo algoritmą arba naujas formules. Į valdymo sistemą galima įtraukti visus lygius: judesių planavimą, aplinkos suvokimą, būsenos įvertinimą jutiklių pagalba. Algoritmai leidžia patikslinti koordinates ir duomenis.
 Drono valdymo sistema
Drono valdymo sistema
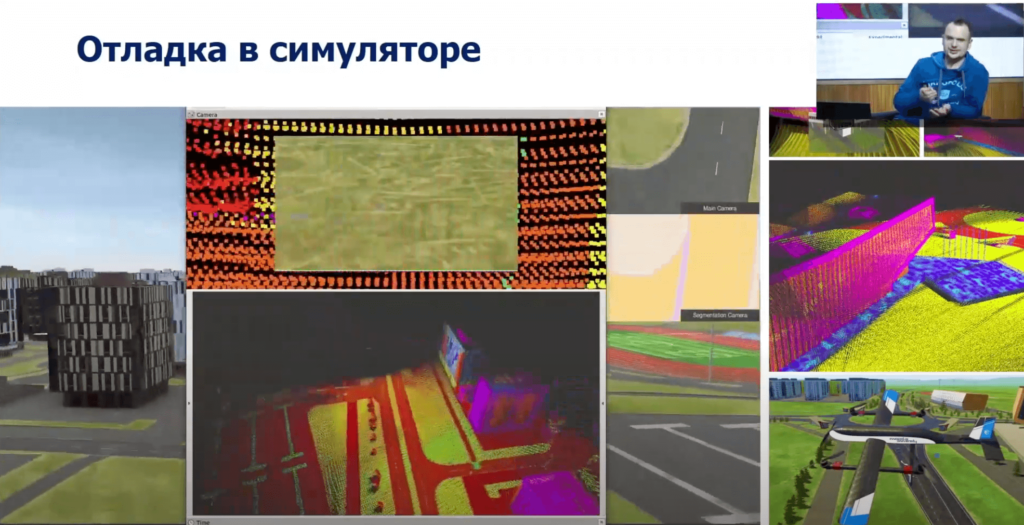
Kai yra valdymo algoritmas, jis gali būti nedelsianttaikyti, tačiau tai padaryti yra gana brangu. Įrenginiai sugenda esant menkiausiai klaidai – į tai reikia atsižvelgti ir pasidaryti atsargines kopijas. Bandymui naudojami simuliatoriai.
Žemiau pateikiama virtuali ekskursija po Innopolįyra mūsų universiteto produktas, jį galima atsisiųsti iš GitHub. Tai ne tik vizualinis komponentas, bet ir visų įrenginio jutiklių duomenys. Jis turi visus padėties jutiklius, yra valdomas kaip dronas ir gali derinti visus valdymo algoritmus.
 Kaip dronai mokosi modeliuojant
Kaip dronai mokosi modeliuojant
Kai remiantis patirtimi su treniruokliu pasirododaugiau pasitikėjimo – galite pereiti prie aparatinės įrangos diegimo. Čia pateikiami jo komponentai: įrenginio gamyba iš anglies ir kompozito, elektronikos kūrimas, variklių išdėstymas, jų tvirtinimas.
Bandymai neprasideda gatvėje:Pirmiausia prietaisai išbandomi ant pakabos arba specialaus stovo. Jie gali būti naudojami nepilotuojamo orlaivio veikimo elementams derinti. Pavyzdžiui, čia rodomas vertikalus kilimo ir tūpimo lėktuvas – tai kopterio ir lėktuvo hibridas, vaizdo įraše galite pamatyti, kaip jis susidoroja su išoriniais trikdžiais ir išlaiko kampą. Dešinėje yra gana beprotiškas eksperimentas, kai vienu metu paleidžiate penkis variklius ir matote, kaip valdymo sistema su tuo elgiasi.
 Kaip statomi dronai
Kaip statomi dronai
Po bandymų jie pereina į skrydžius -nedideli pakilimai nedideliu greičiu, kontroliuojamas judėjimas su pilotu, kuris gali perimti valdymą. Paskutinis akordas – visiškai nepilotuojamas skrydis.
Prietaisas pakyla vertikaliai -„kaip kopteris“, tada įsijungia pagrindinis jo variklis, dronas įsibėgėja, persijungia į lėktuvo režimą ir išvysto pakankamą greitį, kad sparnas veiktų. Tada kontūriniai sraigtai išjungiami, ir jis skrenda kaip lėktuvas – tūpimo procesas vyksta atvirkštine tvarka.
Kas vyksta su dronais
Viena iš šiuolaikinių užduočiųmokslininkai – aplenkdami kliūtis skrydžio metu. Kai kurie dronai tai jau moka, tačiau užduotis kiek platesnė – reikia išmokyti įrenginius kuo greičiau judėti aplinkoje, kurioje yra kliūčių. Ir dar yra kur stengtis ir tobulinti algoritmus.
Kitas tokio bandymo pavyzdys – skrydis įmiškas. Yra labai įdomus požiūris – čia naudojami ne tik nauji algoritmai, bet ir jutikliai – įvykių kamera. Tai labai aukšto dažnio kamera, kuri perduoda skirtumą tarp kadrų kiekvienu laiko vienetu: tai leidžia greitai valdyti ir reaguoti į kliūtis.
Dronų judėjimo planavimo srityjekonkurencija: kas tai padarys greičiau. Užduotis – sužymėti nežinomą sritį, sukurti jos trimatį vaizdą, rasti joje objektus. Universitete skridome, bet išsprendėme ir objektų paieškos problemą. Mūsų rezultatai buvo net geresni nei žinomi paskelbti algoritmai.
Dronų lenktynėse vyksta varžybos.Jie gaminami įrenginiuose su kamera, kai pilotas turi akinius ir valdo droną, kad kuo greičiau praskristų pro vartus. Gana įspūdingas renginys, kur tą pačią užduotį reikia atlikti automatiniu režimu. Deja, kol kas kompiuteriui pavyko nugalėti žmogų tik šachmatų rungtyje, o bepiločiui robotui nepavyko aplenkti žmogaus piloto, nors pažanga jau gana rimta. Dronas mašininio matymo algoritmo pagalba gali atlikti tokias užduotis, darbas tik padidinti greitį.
Kitas konkursas yra „Microsoft Games ofdronų, tai atliekama simuliatoriuje. Toje pačioje vietovėje vyksta ir vienos garsiausių pirmaujančių varžybų Saudo Arabijoje. Dalyviai ten renkami trejiems metams iš anksto.
Nepilotuojami įrenginiai naudojami dronų šou– Tai įspūdingi renginiai, šiandien tapę fejerverkų pakaitalu. Tačiau tai nėra vienintelis grupės naudojimas – jie gali apžiūrėti didesnį plotą.
Kur kreiptis
Kad tai neatrodytų kaip išskirtinai mokslinėplėtra, žemiau yra „Skydio“ drono demonstracinė versija. Dabar tai yra pažangiausias įrenginys autonomijos požiūriu. Tai pavyzdys, kaip vartotojui jau prieinamame gaminyje kartu naudojamos šiuolaikinės technologijos – kartografija, kliūčių išvengimas, eismo planavimas.
Kita kryptis – nauji dizainailėktuvas. Vienas iš jų – sulankstomi dronai. Vienas iš tokių prietaisų po avarijos gali skristi į ankštas vietas patikrinti. Kitas pavyzdys – dronas, kuris gali išsiskleisti. Pavyzdžiui, jis gali išskristi iš siauro pneumatinio vamzdžio ir tada skristi kaip įprasta.
Mes taip pat turime projektą šioje srityje – tai yraminkštas Tensodronas. Tai pirmasis minkšto apvalkalo dronas, kuris skraido. Malonumas yra tai, kad galite jį numesti ir jis išliks nepakitęs. Be to, galima keisti sijų ilgį, trosų įtempimą.
Du pavyzdžiai, kurie atgysgreitai. Pirma, pristatymas naudojant dronus. Dabar yra labai įdomus įgyvendinimas, kai sujungiame siuntų terminalą ir dronų nusileidimo stotį – tokiu atveju nereikia sukti galvos, kada dronas atskris, kur nusileis, kad galėtume prie jo patekti laiko ir pasiimti krovinį, kol jis nėra pavogtas. Antras pavyzdys – skraidantis taksi. Tai įdomiausia plėtros sritis, jau yra veikiančių prototipų. Tačiau tai įvyks tik artimiausią dešimtmetį.
Kokie pokyčiai skraidančių taksi srityje atsirado per pastaruosius 6 metus:
– Įmonė „Hover“ pristatė įrenginį sužemo triukšmo elektrinis variklis ir kompaktiški matmenys – kaip automobilio. Jis pakyla į 150 m aukštį ir nusileidžia standartinėje automobilių stovėjimo aikštelėje. Dronas skirtas dviems keleiviams, maksimali apkrova – 300 kg, greitis – 200 km/val.
— 2016 metais Rusijos įmonė „Hoversurf“.parodė hoverbike, kurį galite nešiotis su savimi ir bet kada pakilti iš įprastos miesto stovėjimo vietos. Jis pasiekia greitį iki 100 km/h, o kėlimo aukštis priverstinai ribojamas iki 5 metrų saugumo sumetimais.
— 2018 m. sukūrė Airbus keleivisAlpha One VTOL lėktuvas pakilo į 5 metrų aukštį ir ore išbuvo 53 sekundes. Vartotojas galės paskambinti UAV per programą ir patekti iš vieno taško į kitą tiek mieste, tiek už jo ribų.
— 2020 metais pagamino „CityAirbus“ oro taksipirmasis nemokamas skrydis. Bandymai vyko Paryžiaus priemiestyje, Ile-de-France mieste.CityAirbus lėktuvas gali skrieti iki 120 km/h greičiu iki 30 km atstumu. Skraidančio taksi svoris – daugiau nei 2,2 tonos, „CityAirbus“ įrengtos trys keleivių ir viena vairuotojo vieta.
– 2022 metais Kinijos startuolis „Pantuo Aviation“ pristatė T1 – ortakinį skraidantį taksi demonstratorių. Jis skris didesniu nei 300 km/h greičiu, o nuotolis – 250 km.
Skaityti daugiau:
Kosminis zondas nuskriejo 200 km nuo Merkurijaus. Pažiūrėk, ką jis matė
Mokslininkai atskleidžia, kaip vitaminai veikia sergamumą vėžiu
Kiniškas minčių skaitymo šalmas skamba pavojaus signalu, kai žmogus mato pornografinį turinį