Robots var ne tikai pārvietoties, bet arī manipulēt ar objektiem. Pēc autoru domām, šodien pieprasījums pēc
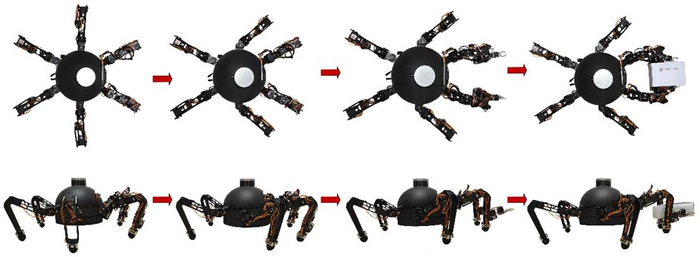
Tāpēc jaunā raksta autori iepazīstināja ar dizainu, kura pamatā ir ekstremitāšu mehānisms, kas ir aprīkots ar dažādiem gala efektoriem, lai uzlabotu veiktspēju.
Komanda atzīmē, ka manipulācijas laikākustība ir labs veids, kā uzlabot efektivitāti un iegūt laiku. Jaunais robots tika saukts par ALLOMAN hexapod, pateicoties kāju un roku integrācijai, robots var kustīgi manipulēt ar objektiem.
Līdz šim ALLOMAN heksapods ir eksperimentālsprototips. Nākamajā darba posmā autori grasās tajā ieviest vairāk manipulāciju funkciju. Savu izstrādi autori plāno izmantot jomās, kur nepieciešamas daudzfunkcionālas platformas, piemēram, pilsētas drošības nodrošināšanai, cīņai pret terorismu un planētu izpēti.
Lasīt vairāk:
Tas ir medīts gadsimtiem ilgi: ko mēs zinām par planētu Vulkāns blakus Saulei
Astronomi ir atraduši planētu netālu no Zemes: tai ir ļoti dīvaina orbīta
Neizskaidrojama dualitāte, kas atrodama elementārdaļiņu fizikā: pie kā tas novedīs