Jaunā darba autori izvirzīja hipotēzi, ka modeļus vislabāk apmācīt, izmantojot prognozēšanu
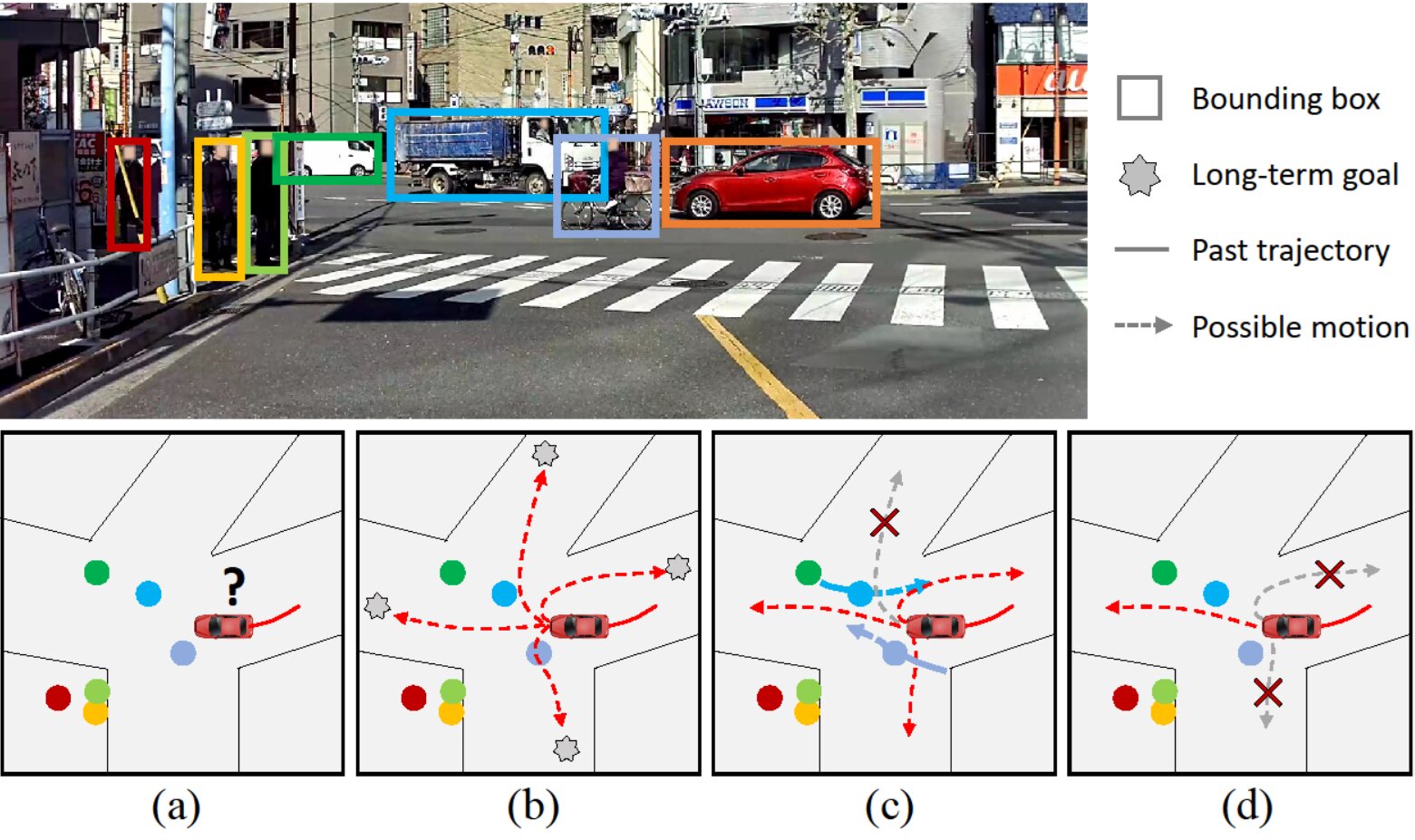
Pētnieki plāno izstrādāt arhitektūru, kurā tiek ņemti vērā gan īstermiņa, gan ilgtermiņa mērķi — tās ir galvenās sastāvdaļas, izvērtējot gājēja vai automašīnas nodomus.
Piemēram, ir automašīna, kas atrodas krustojumāvēlas pagriezties pa kreisi. Ir svarīgi ņemt vērā ne tikai transporta dinamiku, bet arī to, kā nodoms var mainīties atkarībā no dažādiem faktoriem: paša vēlmes, citu satiksmes dalībnieku vai šķēršļu dēļ.
Pēc tam algoritms vispirms iekodē pagātnes pieredzi, pamatojoties uz kuru modelis tika apmācīts, lai prognozētu, kādas varētu būt ilgtermiņa un īstermiņa sekas.
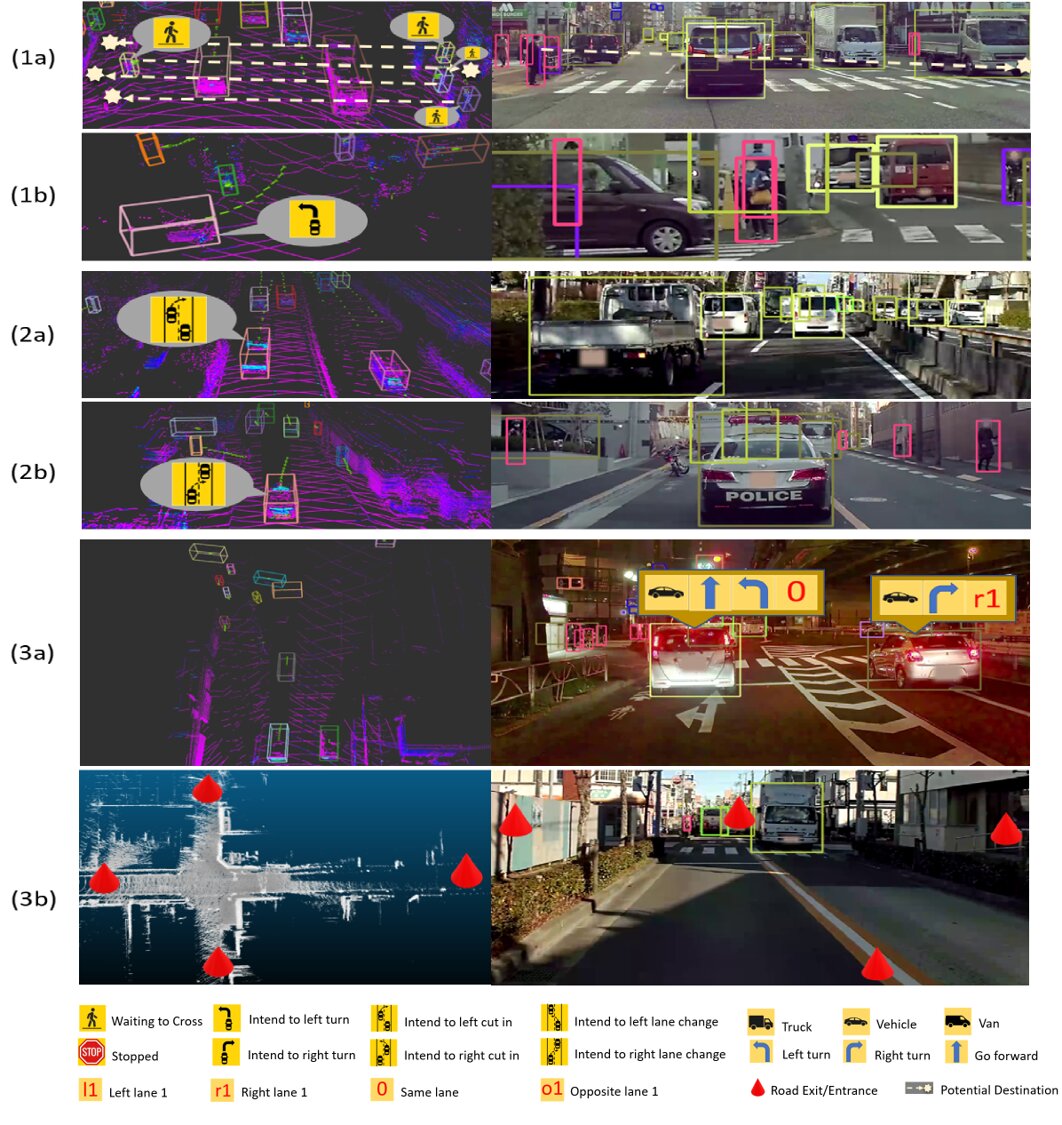
Modelis piešķir visiem apkārtējiem objektiemNorādes ir “nodomi”, kas var mainīties ceļā, “vide”, piemēram, ceļa zīmes un koki, kas ietekmē aģentu nodomus, un “kontekstuālas norādes”, piemēram, laikapstākļi un ceļa apstākļi.
Pētnieki novērtēja savu modeli vairākos testos un atklāja, ka tas par 27% pārspēj citas modernākās trajektorijas prognozēšanas metodes.
Izstrādātāji uzskata, ka modelis var būtizmanto, lai uzlabotu autonomo transportlīdzekļu drošību un veiktspēju. Turklāt citas pētnieku grupas var izmantot LOKI datu kopu, lai sagatavotu savus modeļus, lai prognozētu gājēju un transportlīdzekļu ceļus uz ceļa.
Lasīt Tālāk:
Jauns iOS 15: izlaišanas datums, iPhone dizains un funkcijas. Mēs izstāstām visu, kas ir zināms
No baltā grafēna tika izgatavots īpaši plāns materiāls. Tas aizstās serverus
Redziet smagu uzbrukuma dronu, kas nes tonnu ieroču