Pētnieki no Ilinoisas Universitātes Urbana-Champaign un Prinstonas universitātē izmantoja
Zinātnieki izmantoja nelielu spirāliizpildmehānismi, kas imitē klikšķvaboles krūškurvja muskuļu darbu. Mākslīgais izpildmehānisms velk niecīgu staru, liekot robotam lēnām izlocīties un uzkrāt elastīgo enerģiju. Pēc atbrīvošanas šī enerģija spiež robotu uz augšu.
Iepriekšējos pētījumos zinātnieki to ir atklājušiklikšķvabolei ir īpašs spirālveida muskulis. Tas uzglabā enerģiju un tiek aktivizēts, piemēram, ja kukainis uzripo uz muguras. Asas šī muskuļa iztaisnošanas rezultātā vaboles ķermenis izmetas lielā augstumā, vairākas reizes pārsniedzot savu izmēru. Tas pats mehānisms darbojas arī robotiem.
Viens no maza mēroga robotikas galvenajiem izaicinājumiem ir atrast dizainu, kas ir mazs, bet pietiekami spēcīgs, lai pārvarētu šķēršļus vai ātri atstātu bīstamas vietas.
Sameh Tawfiq, pētniecības vadītājs
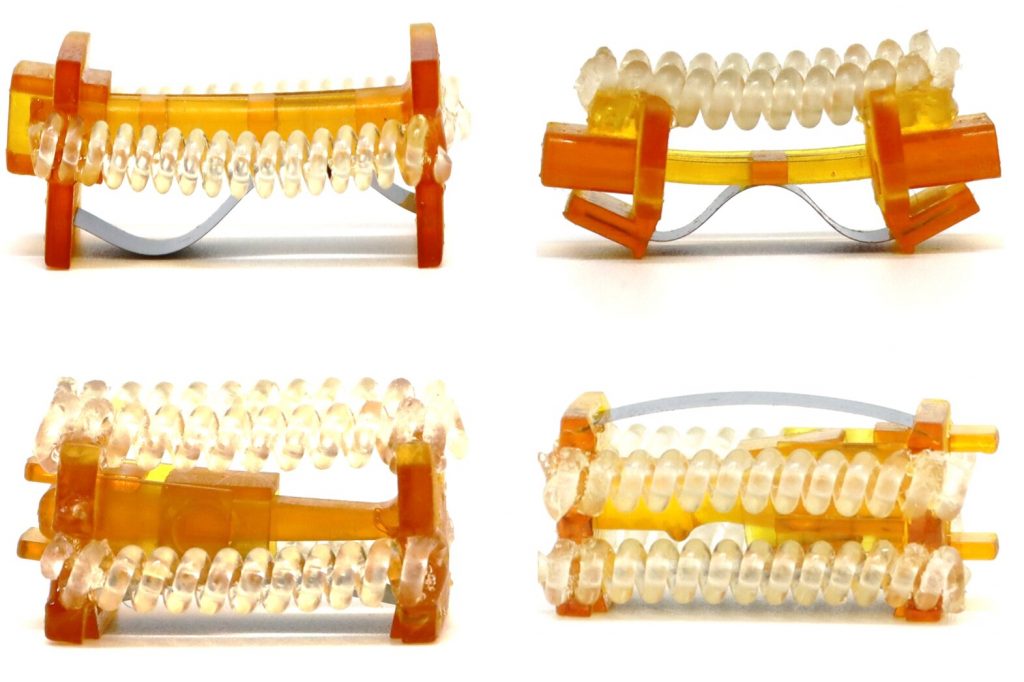 Pētnieku piedāvātie lecošo robotu dizaina varianti. Attēls: Ilinoisas Universitāte Urbana-Champaign
Pētnieku piedāvātie lecošo robotu dizaina varianti. Attēls: Ilinoisas Universitāte Urbana-Champaign
Zinātnieki uzskata, ka sīki roboti to darīsnokļūt grūti sasniedzamās vietās, lai palīdzētu veikt apkopi lielām mašīnām, piemēram, turbīnām un reaktīvo dzinējiem, vai lauksaimniecībā, lai pārbaudītu iekārtas, piemēram, fotografētu, lai identificētu problēmas.
Lasīt vairāk:
Milzu saules plankums griežas pret Zemi. Tas ir redzams ar neapbruņotu aci
Skatieties, kā lido lidmašīna bez asmeņiem. Tā ātrums pārsniedz 900 km/h
Piena ceļš ir neparasti liels tā galaktikas pavedienam
Uz vāka: mākslinieciska idejas ilustrācija. Attēls: Maikls Vincents, Ilinoisas Universitātes Urbana-Champaign