Kas ir roboti?
Pirms dažiem gadiem Reddit parādījās forša lieta - zinātnieki aprakstīja sarežģītu
Robotika ir izmantota sinerģiska metodedarbības joma. Tas sastāv no programmēšanas, mehatronikas un kibernētikas. Mehatronika ir kaut kas, kas mijiedarbojas ar reālo pasauli. Un kibernētika ir daudzsaišu zinātne, kas ietver, pirmkārt, izveidoto programmu pārvaldību.
Kas ir robots?Pirms 15 gadiem daudzi būtu teikuši, ka šī ir robota roka, kas strādā rūpnīcā un veic metināšanu vai krāsošanu. Vēl viena populāra atbilde ir android robots no filmu pasaules. Bet vai kustīgi rati vai bezpilota transportlīdzeklis ir robots? Jā, arī šī ir viena no robotikas jomām. Lidmašīnas arī ir roboti, daži no jaunākajiem sasniegumiem ietver viedās tehnoloģijas un faktiski ir autonomi roboti.
 Mobilie ratiņi ir arī robots
Mobilie ratiņi ir arī robots
Ir arī tāda robotikas joma kā lauksrobotika - "mobilā robotika". Tas ietver visus robotus, kas pārvietojas laukā, ēkā vai zem ūdens. Interesantākais pielietojums, manuprāt, ir lauksaimniecība.
Lidmašīnu vēsture
Lidmašīnu vēsture sākās pagātnēgadsimtā. Pirms tam lidoja tikai baloni bez dzinēja, un tos bija grūti nosaukt par robotiem. Pagājušā gadsimta sākumā darbojās divu veidu lidmašīnas - dirižabļi un lidmašīnas. Pirmo kontrolēto lidojumu veica brāļi Raiti. Turklāt pirmais autopilots parādījās diezgan ātri, gandrīz 10 gadus pēc tam, tas palīdzēja stabilizēt lidojumu.
Pašreizējais robotikas virziens ir saistīts arjaunu atvērto autopilotu, piemēram, PixHawk, izstrāde un pieejamība (PixHawk ir atvērta aparatūra kontrolieriem, droniem un citiem bezpilota lidaparātiem. To izmanto akadēmiskiem, amatieru un profesionāliem mērķiem). Piemērs dronu ienākšanai katra cilvēka dzīvē ir picas piegāde, ko veic uzņēmums Dodo Pizza kopā ar Copt Express - tas notika 2014. gadā.
 Lidmašīnu vēsture
Lidmašīnu vēsture
Kā tiek vadīts drons
Mūsdienu lidmašīnas izmanto vienuno trim pacēluma veidošanas principiem – aerostatiskais, strūklas vai aerodinamiskais. Lidojuma aerodinamisko principu un pacēluma radīšanu (gaisa daļas izmešanu) var īstenot vai nu visa aparāta kustības dēļ, kas aprīkots ar fiksētu gultņa virsmu (spārnu), vai arī atsevišķu nesošo daļu kustības dēļ. aparāta (galvenais rotors, ventilators) attiecībā pret gaisu.
 Kā ierīces lido
Kā ierīces lido
Dronam ir propelleris, kas rada pacēlumu.Nokāpusi no zemes, ierīce sāk ātrāk kustināt dzenskrūvi un paceļas uz augšu. Bet darbības spēks ir vienāds ar reakcijas spēku. Kad dzenskrūve griežas, tiek izveidots moments pretējā virzienā - tāds ir helikopteru un kopteru dizains. Ja helikopteram ir viens propelleris, tas nebūs stabils. Tāpēc ierīce izmanto vai nu divu rotoru shēmu, vai astes rotoru.
Kvadrokopterim ir ļoti vienkāršs dizains -Tam parasti ir četras skrūves, no kurām divas griežas vienā virzienā un divas otrā virzienā. Ja lietotājam jāvirzās uz priekšu, daži dzenskrūves griežas lēnāk, bet citi griežas ātrāk. Un, ja lietotājs vēlas pagriezties, dažas skrūves, kas novietotas pa diagonāli, paātrina, bet citas palēninās.
 Kā lido kvadrokopteris
Kā lido kvadrokopteris
Koptera kustības stūros ir saistītas ar kustību garkoordinātas. Ja pilots vēlas virzīties uz priekšu, mums vispirms ir jānoliek drons uz priekšu un tad, elektroierīcei velkot uz priekšu, tas jānostabilizē vietā, kur vēlamies palikt.
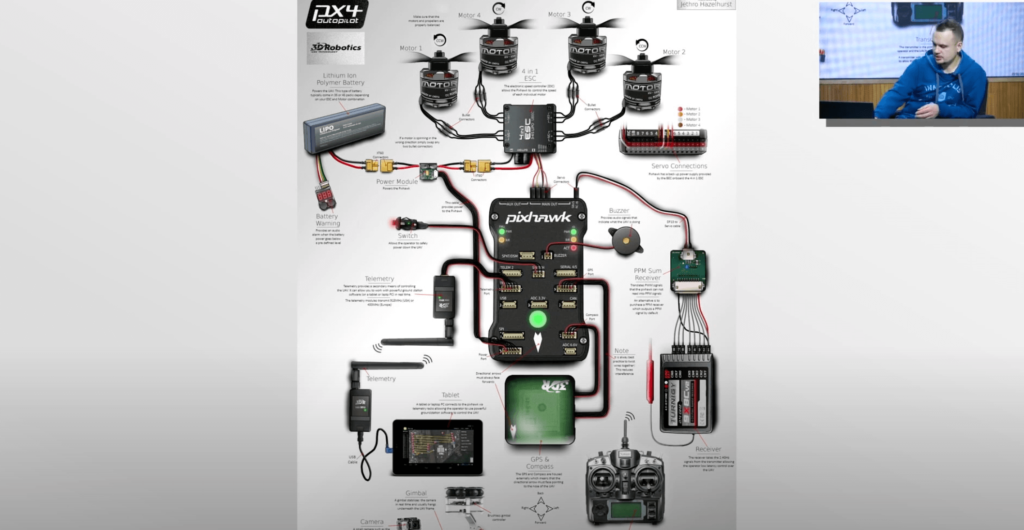
Šī ir viena no populārākajiem autopilotiem diagramma,uz kuru pamata var izgatavot jaunas ierīces. Tas savienojas ar visiem motoriem un sensoriem. Turklāt motoriem ir savs vadības bloks, ESC regulators - elektroniskais ātruma regulators, kas kontrolē motora ātrumu.
No sensoriem ir GPS, lai drons varētustrādāt ārā, lidot uz punktiem un stabilizēt pozīciju. Bet pašā autopilota iekšpusē ir arī IMU - inerciālais sensora modulis, kas ļauj tam noteikt attieksmes leņķus. Ir arī sakaru kanāls, zemes vadības stacija un akumulators.
 UAV ierīce
UAV ierīce
Kā minēts iepriekš, ir līmenisdzinēja vadība - mēs bez vilcināšanās varam iestatīt griešanās ātrumu. Pārējie līmeņi darbojas pēc tāda paša principa: nākamais ir orientācijas kontrole.
Bet vispirms mums jākontrolē rotācijas ātrums- FPV kopteri lido šajā līmenī (ierīces, kas ļauj skatīties attēlu no drona kameras reāllaikā no pirmās personas (FPV – First Person View). Pieredzējuši piloti nosaka rotācijas ātrumu un pastāvīgi stūrē ar kursorsviru. Nākamais posms ir, kad lietotājs var stabilizēt leņķi, bet drons joprojām kustēsies. Tālāk ir ātruma kontrole, un augstākā ir pozicionālā kontrole, manevri, lai pārvietotos uz punktu vai pārvietotos pa noteiktu trajektoriju.
Tie, kas vēlas programmēt, būvēt unvadības droni - vajadzētu pievērst uzmanību PIX4 atvērtā koda autopilotam. Ap aerorobotiku (ROS – robotu operētājsistēmu jeb Open robotics) ir vesela kopiena, ir simulatori droniem. Tāpēc daudzus eksperimentus var veikt simulatorā bez paša drona.
Drona izstrādes posmi
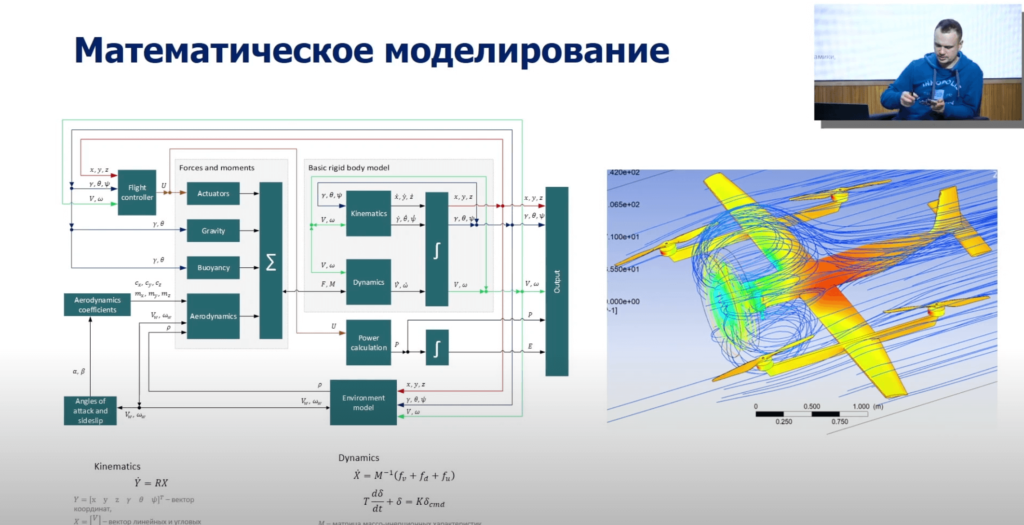
Pētnieki sāk ar konceptuālumodelēšanu, un tad viņiem ir jāizveido precīzs aparāta modelis. Neiedziļinoties formulā, koptera modelis būtībā ir stingra virsbūves modelis. Šis ir otrais Ņūtona likums, kas attiecināts uz daļiņu sistēmām. Tam ir translācijas un rotācijas kustība, ir kustības kinemātika un dinamika, un, lai aprakstītu konkrētas ierīces modeli, šeit jāpievieno spēku vienādojums, kas iedarbojas uz konkrētu dronu.
 Kā tiek modelēti bezpilota lidaparāti
Kā tiek modelēti bezpilota lidaparāti
Nākamais solis ir sistēmas izstrādevadība. Ja ejam pa klasisko ceļu: vispirms noskaidrojam precīzu matemātisko modeli un uz tā pamata jau sintezējam vadības algoritmu vai jaunas formulas. Vadības sistēmā var iekļaut visus līmeņus: kustību plānošanu, vides uztveri, stāvokļa novērtēšanu ar sensoru palīdzību. Algoritmi ļauj mums precizēt mūsu koordinātas un datus.
 Drona vadības sistēma
Drona vadības sistēma
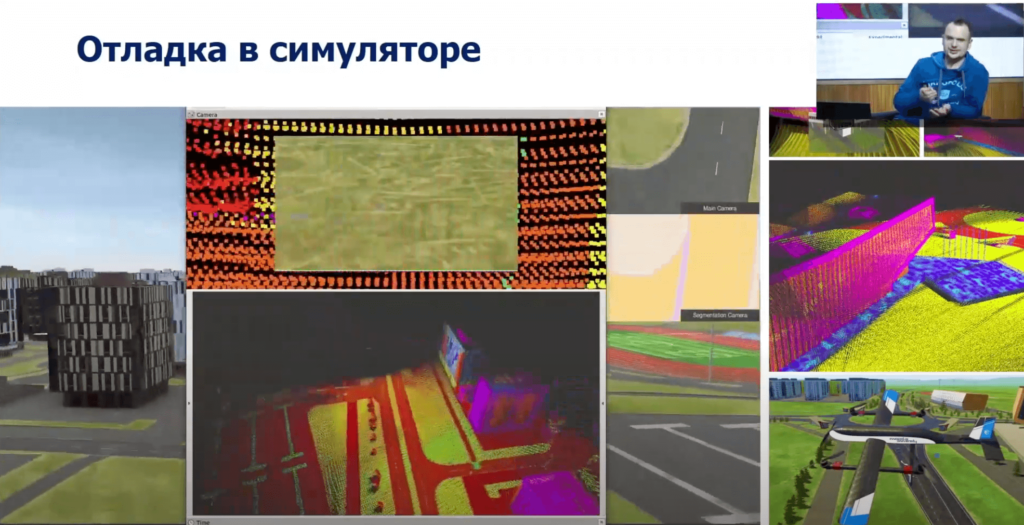
Kad ir vadības algoritms, tas var būt uzreizpieteikties, taču to darīt ir diezgan dārgi. Ierīces avarē pie mazākās kļūdas - tas ir jāņem vērā un jāveido dublējumkopijas. Testēšanai tiek izmantoti simulatori.
Zemāk ir virtuālā ekskursija pa Innopolisuir mūsu universitātes produkts, tas ir pieejams lejupielādei vietnē GitHub. Tas ir ne tikai vizuāls komponents, bet arī visu ierīces sensoru dati. Tam ir visi pozīcijas sensori, tas tiek vadīts kā drons un var atkļūdot visus vadības algoritmus.
 Kā droni mācās simulācijā
Kā droni mācās simulācijā
Pamatojoties uz pieredzi ar simulatoru parādāslielāka pārliecība - varat pāriet uz aparatūras ieviešanu. Šeit ir parādītas tās sastāvdaļas: ierīces izgatavošana no oglekļa un kompozītmateriāla, elektronikas izveide, dzinēju izvietojums, to stiprinājumi.
Pārbaudes nesākas uz ielas:Pirmkārt, ierīces tiek pārbaudītas uz balstiekārtas vai īpaša statīva. Tos var izmantot, lai atkļūdotu bezpilota lidaparāta darbības elementus. Piemēram, šeit ir parādīta vertikāla pacelšanās un nosēšanās lidmašīna - tas ir koptera un lidmašīnas hibrīds, video var redzēt, kā tas tiek galā ar ārējiem traucējumiem un saglabā leņķi. Labajā pusē ir diezgan traks eksperiments, kurā jūs iedarbināt piecus dzinējus vienlaikus un redzēt, kā vadības sistēma to apstrādā.
 Kā tiek būvēti droni
Kā tiek būvēti droni
Pēc pārbaudes viņi pāriet uz lidojumiem -nelielas pacelšanās zemā ātrumā, kontrolēta kustība ar pilotu, kurš var pārņemt vadību. Pēdējais akords ir pilnīgi bezpilota lidojums.
Ierīce paceļas vertikāli -“kā kopteris”, tad ieslēdzas tā galvenais dzinējs, drons paātrina, pārslēdzas uz lidmašīnas režīmu un attīsta pietiekamu ātrumu, lai spārns darbotos. Pēc tam kontūras dzenskrūves tiek izslēgtas, un tā lido kā lidmašīna – nosēšanās process notiek apgrieztā secībā.
Kas notiek ar droniem
Viens no uzdevumiem, kas mūsdienuzinātnieki — apiet šķēršļus lidojuma laikā. Daži droni jau zina, kā to izdarīt, taču uzdevums ir nedaudz plašāks – jāiemāca ierīcēm maksimāli ātri pārvietoties vidē ar šķēršļiem. Un vēl ir kur censties un uzlabot algoritmus.
Vēl viens šādas pārbaudes piemērs ir lidojums uzmežs. Ir ļoti interesanta pieeja – šeit tiek izmantoti ne tikai jauni algoritmi, bet arī sensori – notikumu kamera. Šī ir ļoti augstas frekvences kamera, kas pārraida atšķirību starp kadriem katrā laika vienībā: tas ļauj ātri kontrolēt un reaģēt uz šķēršļiem.
Dronu kustības plānošanas jomākonkurence: kurš to izdarīs ātrāk. Uzdevums ir kartēt nezināmu apgabalu, izveidot tā trīsdimensiju attēlojumu, atrast tajā objektus. Mēs lidojām augstskolā, bet arī atrisinājām objektu atrašanas problēmu. Mūsu rezultāti bija pat labāki nekā zināmie publicētie algoritmi.
Notiek sacensības dronu sacīkstēs.Tie tiek veidoti ierīcēs ar kameru, kad pilotam ir aizsargbrilles un viņš vada dronu, lai pēc iespējas ātrāk izlidotu cauri vārtiem. Diezgan iespaidīgs pasākums, kur tas pats uzdevums jāveic automātiskajā režīmā. Diemžēl līdz šim datoram cilvēku izdevies uzveikt tikai šahā, un bezpilota robotam nav izdevies apsteigt cilvēku pilotu, lai gan progress jau ir diezgan nopietns. Drons ar mašīnredzes algoritma palīdzību var veikt šādus uzdevumus, darbs ir tikai, lai palielinātu ātrumu.
Vēl viens konkurss ir Microsoft Games ofdroniem, tas tiek veikts simulatorā. Tajā pašā apgabalā notiek vienas no slavenākajām vadošajām sacensībām Saūda Arābijā. Tur dalībnieki tiek pieņemti darbā trīs gadus iepriekš.
Bezpilota ierīces tiek izmantotas dronu šoviem– Tie ir iespaidīgi notikumi, kas mūsdienās ir kļuvuši par uguņošanas aizvietotāju. Bet tas nav vienīgais grupas lietojums — viņi var pārbaudīt lielāku platību.
Kur pieteikties
Lai tas neizskatītos kā tikai zinātnisksizstrāde, zemāk ir Skydio drona demonstrācija. Tagad šī ir vismodernākā ierīce autonomijas ziņā. Šis ir piemērs tam, kā lietotājam jau pieejamā produktā vienkopus tiek izmantotas mūsdienu tehnoloģijas - kartogrāfija, šķēršļu novēršana, satiksmes plānošana.
Vēl viens virziens ir jauni dizainilidmašīna. Viens no tiem ir salokāmi droni. Viena šāda ierīce var lidot šaurās vietās pārbaudei pēc negadījuma. Vēl viens piemērs ir drons, kas var izvērsties. Piemēram, viņš var izlidot no šauras pneimatiskās caurules un pēc tam lidot kā parasti.
Mums ir arī projekts šajā jomā – tas irmīkstais Tensodrons. Šis ir pirmais mīkstā apvalka drons, kas lido. Prieks ir tas, ka varat to nomest, un tas paliks neskarts. Turklāt jūs varat mainīt siju garumu, kabeļu spriegojumu.
Divi piemēri, kas atdzīvosiesdrīzumā. Pirmkārt, piegāde, izmantojot dronus. Tagad ir ļoti interesanta realizācija, kur apvienojam pakomātu un dronu nosēšanās staciju – šajā gadījumā mums nav jāuztraucas par to, kad drons pienāks, kur tas nolaidīsies, lai mēs varētu pie tā nokļūt laiku un paņemt kravu, pirms tā tiek nozagta. Otrs piemērs ir lidojošs taksometrs. Šī ir aizraujošākā attīstības joma, un jau darbojas prototipi. Bet tas notiks tikai nākamajā desmitgadē.
Kādi notikumi lidojošo taksometru jomā ir parādījušies pēdējo 6 gadu laikā:
- Uzņēmums "Hover" prezentēja ierīci arzema trokšņa līmeņa elektromotors un kompakti izmēri - kā automašīnai. Tas paceļas 150 m augstumā un nolaižas standarta stāvvietā. Drons paredzēts diviem pasažieriem, maksimālā kravnesība ir 300 kg, bet ātrums 200 km/h.
— 2016. gadā Krievijas uzņēmums Hoversurfparādīja hoverbike, kuru varat nēsāt līdzi un jebkurā laikā pacelties no parastās pilsētas stāvvietas. Tas sasniedz ātrumu līdz 100 km/h, un drošības apsvērumu dēļ pacelšanas augstums ir piespiedu kārtā ierobežots līdz 5 metriem.
— 2018. gadā izstrādājis Airbus pasažierisAlpha One VTOL lidmašīna pacēlās 5 metru augstumā un noturējās gaisā 53 sekundes. Lietotājs varēs piezvanīt UAV, izmantojot lietojumprogrammu, un nokļūt no viena punkta uz otru gan pilsētā, gan ārpus tās.
— 2020. gadā izgatavoja CityAirbus gaisa taksometrupirmais bezmaksas lidojums. Testēšana notika Parīzes priekšpilsētā, Ildefransas pilsētā.CityAirbus lidmašīna spēj pārvietoties ar ātrumu līdz 120 km/h attālumā līdz 30 km. Lidojošā taksometra svars ir vairāk nekā 2,2 tonnas, CityAirbus ir aprīkots ar trim pasažieru sēdvietām un vienu vadītāja vietu.
- 2022. gadā Ķīnas jaunuzņēmums Pantuo Aviation prezentēja lidojošu taksometru demonstratoru T1 ar gaisa vadu. Tas lidos ar ātrumu virs 300 km/h, un tā darbības rādiuss ir 250 km.
Lasīt vairāk:
Kosmiskā zonde lidoja 200 km attālumā no Merkūrija. Paskaties, ko viņš redzēja
Zinātnieki atklāj, kā vitamīni ietekmē vēža sastopamību
Ķīniešu domu lasīšanas ķivere atskan trauksmes signāls, kad cilvēks redz pornogrāfisku saturu