Инженеры из Кембриджского университета разработали мягкую роботизированную руку, напечатанную на
De onderzoekers gebruikten gedruktEen antropomorfe hand geïmplanteerd met tactiele sensoren in een 3D-printer, zodat de hand kan ‘voelen’ wat hij aanraakt. De hand was alleen in staat tot passieve beweging op basis van de pols. “Het grote voordeel van dit ontwerp is het bewegingsbereik dat we kunnen bereiken zonder gebruik te maken van actuatoren”, zeggen de auteurs.
Обучение «пассивной» роборуки. Видео: University of Cambridge
Wetenschappers voerden ruim 1.200 tests uit met een robotarm,kijkend naar haar vermogen om kleine voorwerpen te pakken zonder ze te laten vallen. Aanvankelijk werd de robot getraind met behulp van kleine 3D-geprinte plastic balletjes en deze vastgegrepen met behulp van vooraf bepaalde acties die waren afgeleid van menselijke demonstraties.
De robot gebruikte vallen en opstaanOntdek welke vangst succesvol zal zijn. Nadat hij klaar was met zijn baltraining, probeerde hij verschillende voorwerpen te pakken, waaronder een perzik, een computermuis en een rol noppenfolie. Bij deze tests kon de hand 11 van de 14 voorwerpen met succes vastpakken.
Objecten van verschillende afmetingen, vormen en texturen vastleggen- een taak die eenvoudig is voor een mens, maar moeilijk voor een robot. De meeste moderne robots zijn niet in staat manipulatieve taken uit te voeren die kleine kinderen gemakkelijk aankunnen. Mensen weten bijvoorbeeld instinctief hoeveel kracht ze moeten gebruiken om een ei op te tillen, maar voor een robot is dit een probleem: niet sterk genoeg zal het voorwerp doen vallen, te sterk zal het ei breken.
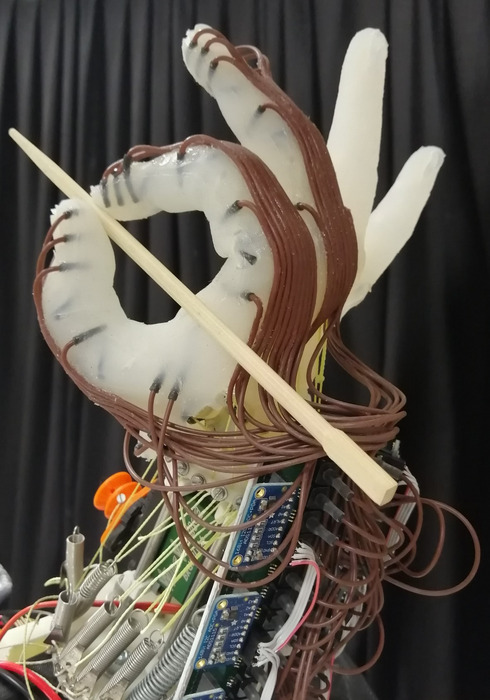 Prototype robotgrijper. Afbeelding: Universiteit van Cambridge
Prototype robotgrijper. Afbeelding: Universiteit van Cambridge
Geavanceerde technologie met gemotoriseerde vingersvereist een aanzienlijke hoeveelheid energie en een groot aantal complexe en dure actuatoren voor elk gewricht. De door de ingenieurs voorgestelde passieve grip maakt de robot veel gemakkelijker te besturen en veel energiezuiniger. De onderzoekers geloven dat hun aanpasbare ontwerp kan worden gebruikt om goedkope robotica te ontwikkelen die in staat zijn tot meer natuurlijke bewegingen.
Lees verder:
Kijk naar de kaart met de hoogste resolutie van Mars: 110.000 frames en 5,7 biljoen pixels
"Zee" van quarks binnen één proton: waar bestaat een elementair deeltje uit
Nieuw beeld van Hubble verbaasde wetenschappers
На обложке: прототип роботизированного захвата. Изображение: University of Cambridge