Onderzoekers van het Italiaanse Instituut voor Technologie hebben een prototype gepresenteerd van een driepotige robot die
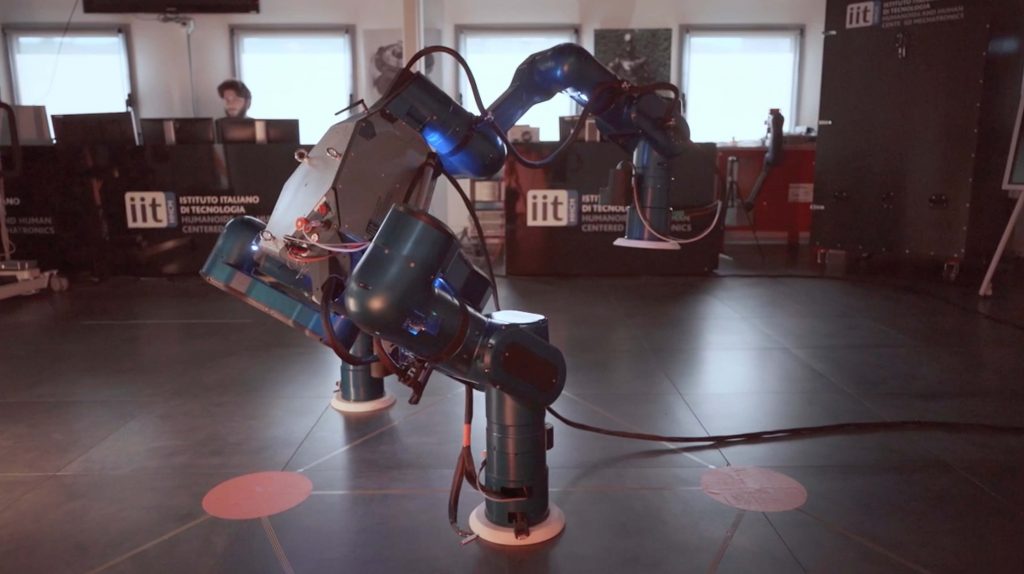
Het MARM-robotplatform bestaat uitcentraal lichaam, drie ledematen en een speciaal docking-apparaat. Die laatste wordt gebruikt om het toestel op te laden en data uit te wisselen. Bij het maken van een robot hebben wetenschappers de mogelijkheid geboden om zowel in aanwezigheid van zwaartekracht als in microzwaartekracht te werken.
Robot-MARM. Video: IIT
De MARM-robot kan hiervoor drie ledematen gebruikenbeweging door standaardverbindingen op stationsoppervlakken vast te pakken en eroverheen te kruipen. Bovendien kan het componenten van verschillende apparaten assembleren en plaatsen, zoals het verplaatsen en installeren van de 1,2 m brede modulaire zeshoekige platen die op het ISS worden gebruikt, en het manipuleren van orbitale plug-ins.

Robot-MARM. Foto's: IIT
Configuratie met drie ledematen - Basishet verschil tussen de nieuwe robot en eerdere ontwikkelingen. Dit zorgt volgens ingenieurs voor meer flexibiliteit in de bediening van het apparaat. Hij kan bijvoorbeeld twee "handen" gebruiken om te werken, waarbij hij zich aan het oppervlak vasthoudt met behulp van de andere.
Onderzoekers stellen voor om MARM te gebruikenpak goederen op uit het magazijn, verplaats ze naar de juiste plaats, verzamel en plaats ze. Met dit scenario in gedachten wordt het prototype getest in microzwaartekracht, waarna een werkende versie wordt gemaakt om naar het ISS te worden gestuurd.
Lees verder:
Wetenschappers uit de permafrostzone: hoe ze slimme kleding en een kankervaccin ontwikkelen
Niet ver van de aarde zijn twee planeten gevonden. Misschien zijn ze bewoond
Wetenschappers hebben ontdekt wie profiteerde van de dood van dinosaurussen