Om de mogelijkheden van autonome onbemande luchtvaartuigen (UAV's), wetenschappers en ingenieurs uit te breiden
Het model heet Agilicious, en de onderzoekersbeweren dat het quadcopters beter in staat zou kunnen stellen om obstakels te navigeren en trajecten te volgen, zelfs bij hoge snelheden tijdens hun reizen. Bovendien is het model zowel bruikbaar bij echte vluchten als bij virtuele simulaties.
“Door open source Agilicious bieden wijonderzoeks- en industriële gemeenschap toegang tot een zeer flexibel, veelzijdig en uitbreidbaar quadcopterplatform”, aldus de onderzoekers.
Bron:
wetenschappelijke robotica
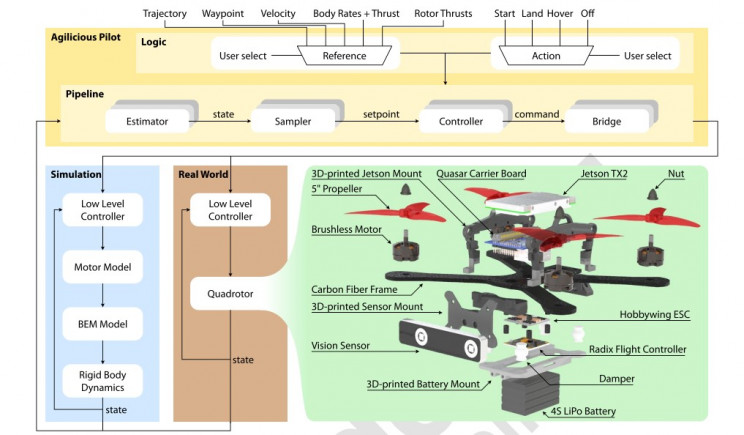
In hun Agilicious-platform gebruikten zegeavanceerde ingebouwde vision-sensoren, vluchtbewakingssystemen en andere componenten. Uiteindelijk verbeterden ze de realtime perceptie van drones, het volgen van trajecten en de vaardigheden voor vluchtplanning.
Daarnaast is het platform ook uitgerust met NVIDIAJetson TX2, een krachtige en energiebesparende kunstmatige-intelligentiemodule die complexe rekentaken uitvoert om de hardwarefuncties te ondersteunen.
Lees verder:
De jonge ster 'verborg' iets dat de kijk van wetenschappers op het heelal veranderde. Het belangrijkste
Wetenschappers ontdekken hoe vitamines de incidentie van kanker beïnvloeden
Een gemakkelijke manier om in een droom af te vallen wordt binnenkort getest op vrijwilligers