De auteurs van het nieuwe werk veronderstelden dat modellen het beste kunnen worden getraind met behulp van voorspellingen
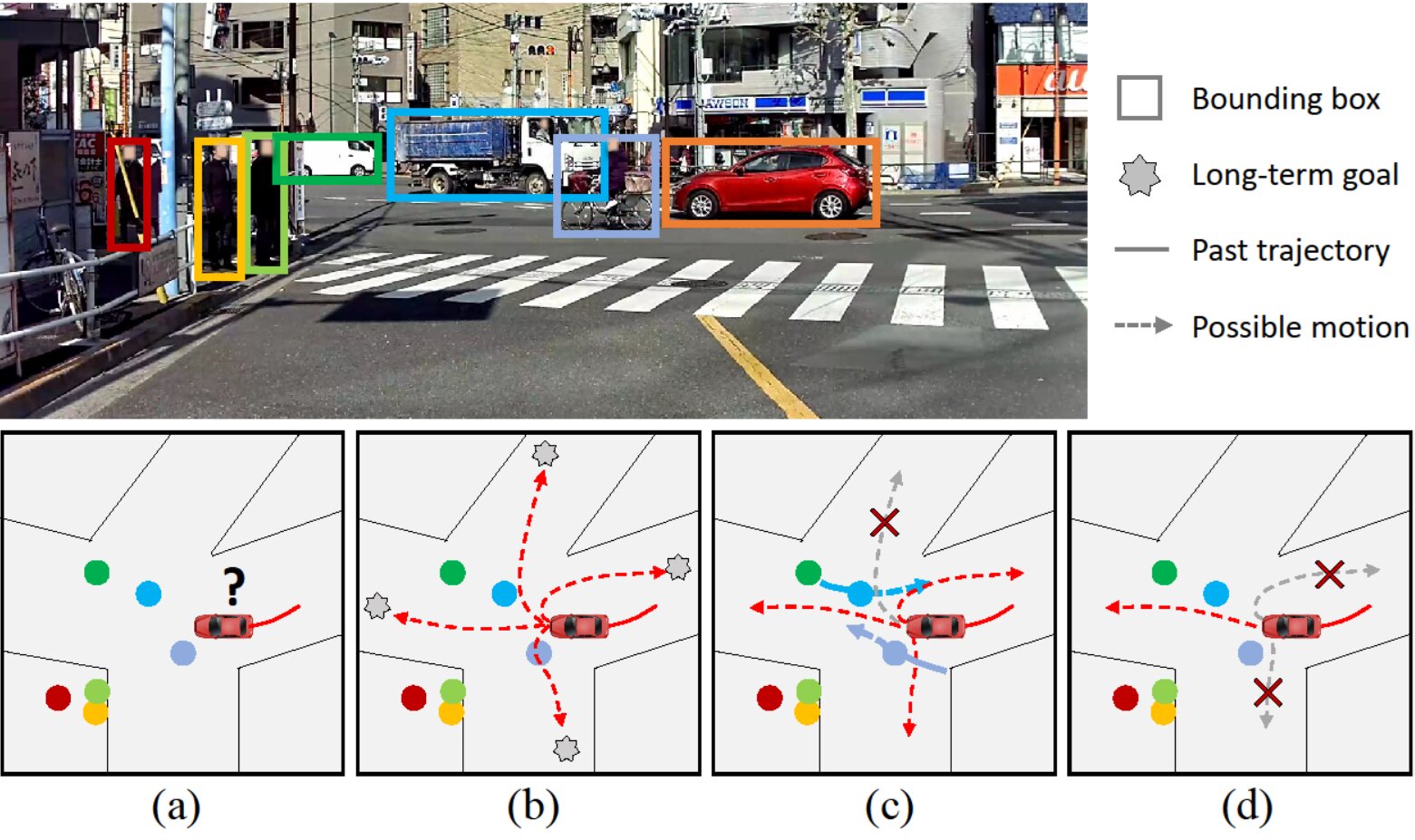
De onderzoekers zijn van plan een architectuur te ontwikkelen die rekening houdt met zowel korte- als langetermijndoelen – dit zijn de belangrijkste componenten bij het beoordelen van de bedoelingen van een voetganger of een auto.
Er staat bijvoorbeeld een auto op een kruispuntwil naar links. Het is belangrijk om niet alleen rekening te houden met de dynamiek van het vervoer, maar ook hoe de intentie kan veranderen afhankelijk van verschillende factoren: door de eigen wens, andere weggebruikers of obstakels.
Vervolgens codeert het algoritme eerst de ervaringen uit het verleden waarop het model is getraind om te voorspellen wat de gevolgen op de lange en korte termijn zouden kunnen zijn.
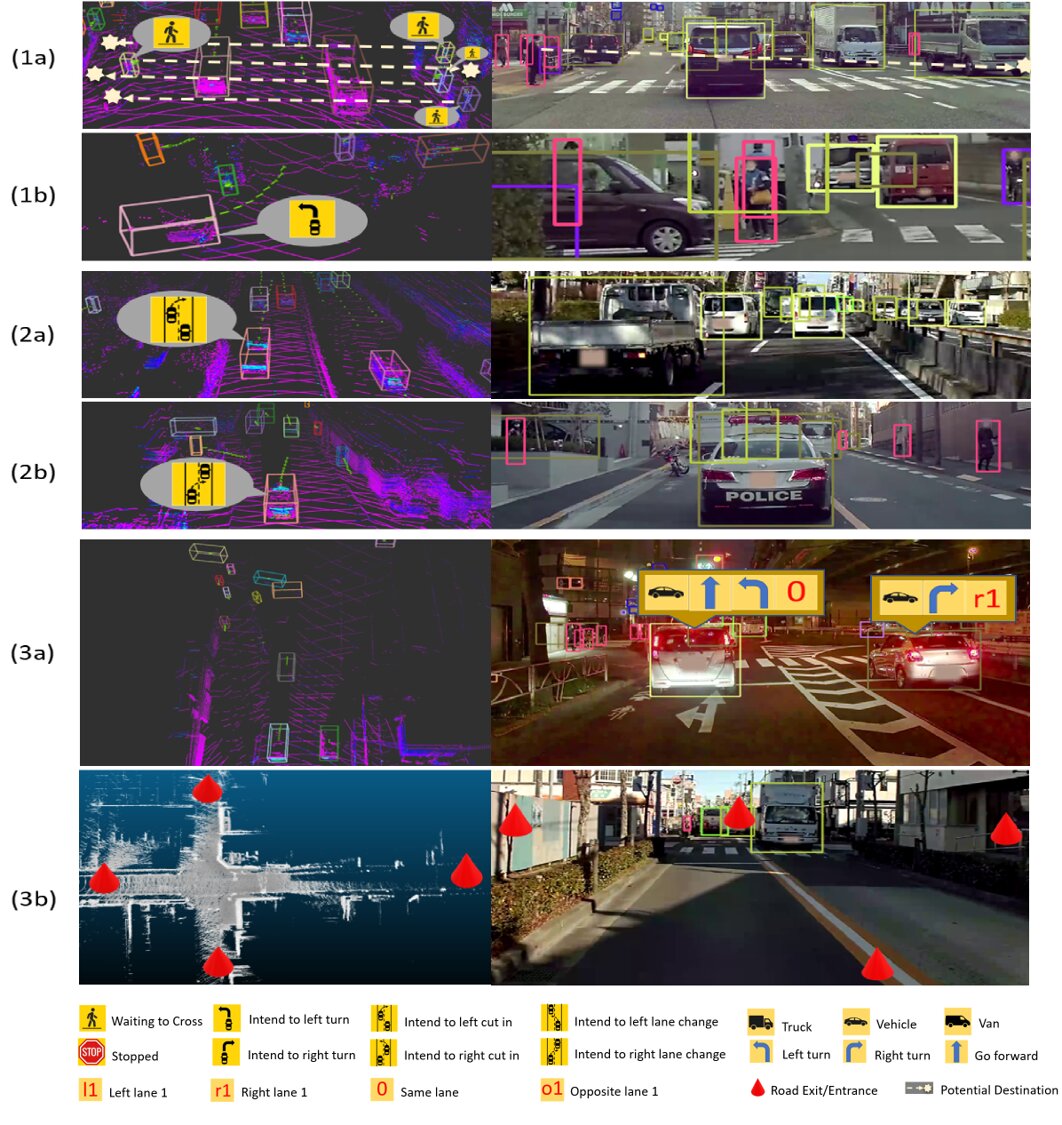
Het model kent alle omringende objecten toeSignalen zijn ‘intenties’ die onderweg kunnen veranderen, ‘omgeving’ zoals verkeersborden en bomen die de intenties van agenten beïnvloeden, en ‘contextuele signalen’ zoals weers- en wegomstandigheden.
De onderzoekers evalueerden hun model in een reeks tests en ontdekten dat het 27% beter presteerde dan andere geavanceerde trajectvoorspellingsmethoden.
De ontwikkelaars zijn van mening dat het model kan wordengebruikt om de veiligheid en prestaties van autonome voertuigen te verbeteren. Daarnaast kunnen andere onderzoeksgroepen de LOKI-dataset gebruiken om hun eigen modellen voor te bereiden om de paden van voetgangers en voertuigen op de weg te voorspellen.
Lezen Verder:
Nieuw iOS 15: releasedatum, iPhone-ontwerp en functies. We vertellen alles wat bekend is
Van wit grafeen is een ultradun materiaal gemaakt. Het zal servers vervangen
Zie een zware aanvalsdrone die een heleboel wapens draagt