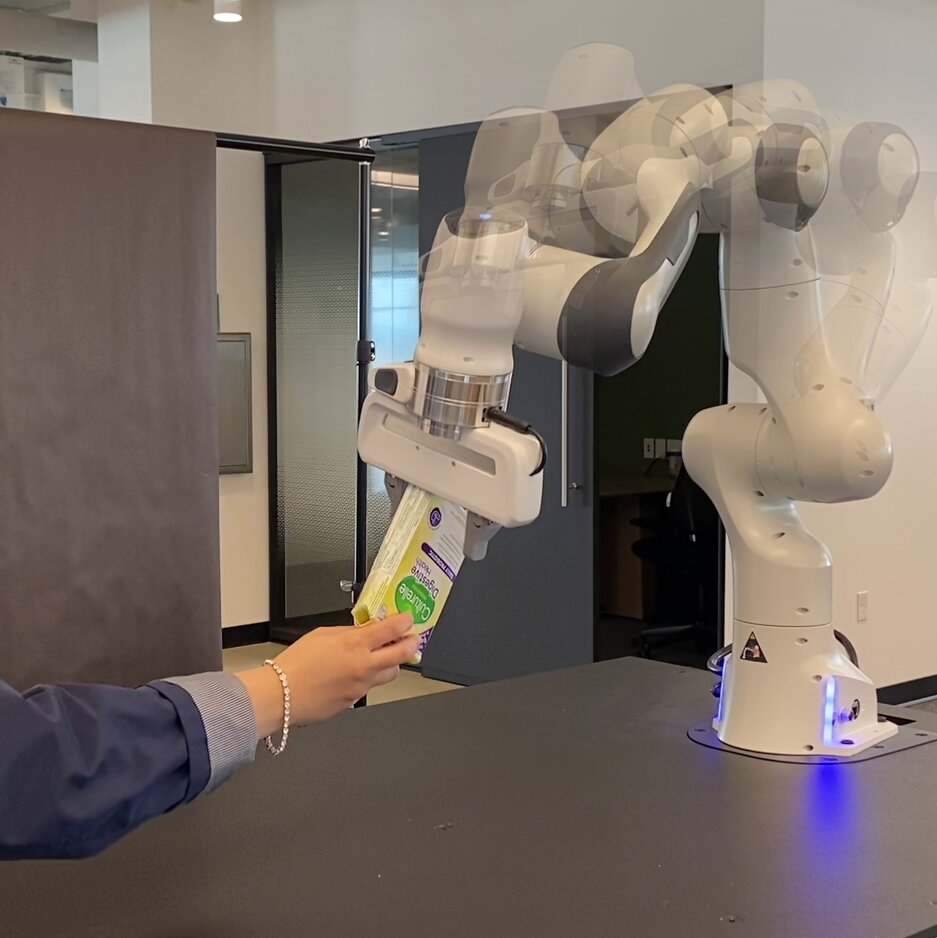
Het nieuwe model voorspelt op welke manier het apparaat een voorwerp uit iemands hand zal halen. Zij definieert
“Onze MPC-aanpak, genaamd STORM,werkt door veel verschillende mogelijke bewegingen te bemonsteren die de robot kan maken vanaf de huidige locatie naar de plaats waar het object zich bevindt”, legt Fox uit. “Het maakt gebruik van GPU-computing om deze trajecten te schatten. Je kunt tot 500 trajecten tegelijkertijd controleren.”
Het model actualiseert de beslissingen van de robot meerdere keren per seconde. Hierdoor kan hij het geplande traject en zijn beslissingen over waar het object op te halen snel aanpassen.
De auteurs evalueerden de prestaties van hun model inverschillende experimenten waarbij robots verschillende items passeerden en ontvingen tijdens interactie met vier mensen. De onderzoekers noemden de resultaten van het werk succesvol.
Lees verder:
Er wordt al eeuwen op gejaagd: wat weten we over de planeet Vulcan naast de zon
Astronomen hebben een planeet in de buurt van de aarde gevonden: die heeft een heel vreemde baan
Onverklaarbare dualiteit gevonden in elementaire deeltjesfysica: waar leidt het toe?