Dankzij de door robotici voorgestelde leermethode kan de robot zelfstandig zwemmanoeuvres leren uitvoeren.
“In onze studie presenteerden weeen biologische versterkingsleermethode voor het simuleren van de beweging van onderwaterrobots”, zegt Gang Chen, een van de auteurs van de ontwikkeling. “Deze methode is gebaseerd op een van onze eerdere werken over beverbeweging, gepubliceerd in Springer Link’s Journal of Intelligent & Robotsystemen".
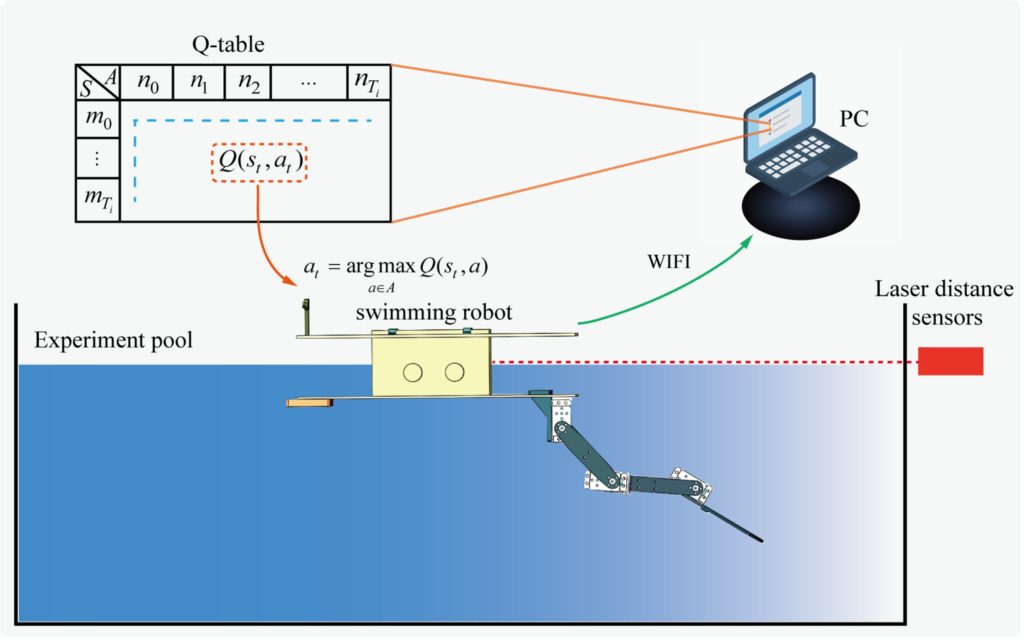 Het principe van de training van de beverrobot
Het principe van de training van de beverrobot
Onderwaterrobots zoals die van Chen en zijncollega's zijn niet-lineaire systemen en hun bewegingen omvatten complexe hydrodynamica. Het nauwkeurig modelleren van hun beweging kan dus een zeer complexe taak zijn die aanzienlijke rekenkracht vereist.
In tegenstelling tot andere modellen voor onderzeeërbesturingDe robotbenadering die door Chen en collega's is ontwikkeld, vereist geen integratie van complexe bewegingsmodellen op basis van vloeistofdynamica. Dit komt door het feit dat het gebaseerd is op een vereenvoudiging van de ideeën over het werk van de gewrichten die verantwoordelijk zijn voor het zwemmen in bevers. Dit maakt het makkelijker om het model te trainen en vermindert ook de inefficiënte bewegingen van de robot tijdens het trainen.
“Door versterkend leren te combineren metmechanismen die ten grondslag liggen aan het zwemgedrag van bevers, implementeert onze methode robotcontrole over zwemmen zo snel en efficiënt mogelijk, "legde Chen uit. "Het meest opvallende voordeel is dat het het creëren van complexe motion control-modellen vermijdt en snel de zwembesturing van een beverachtige eenbenige robot implementeert."
Lees verder
Amerikaanse satelliet "zag" een ongebruikelijk bericht van de aarde
Gepubliceerde video van de raket, gelanceerd vanaf een experimentele versneller
Het monster in het centrum van onze Melkweg: kijk naar de foto van een zwart gat in de Melkweg