Onderzoekers van het Massachusetts Institute of Technology hebben een robotarm ontwikkeld met hoge
De ontwikkeling is gebaseerd op een robotvinger meteen stijf skelet omsloten door een zachte buitenlaag. In de vinger plaatsten de onderzoekers verschillende GelSight-sensoren met hoge resolutie ingebed onder een transparante siliconen ‘huid’ om dwarsdoorsnedebeelden te verkrijgen. Ze gebruiken een camera en drie LED's om visuele informatie te verzamelen over de vorm van een object, waardoor ze continu kunnen lezen over de gehele lengte van de vinger.
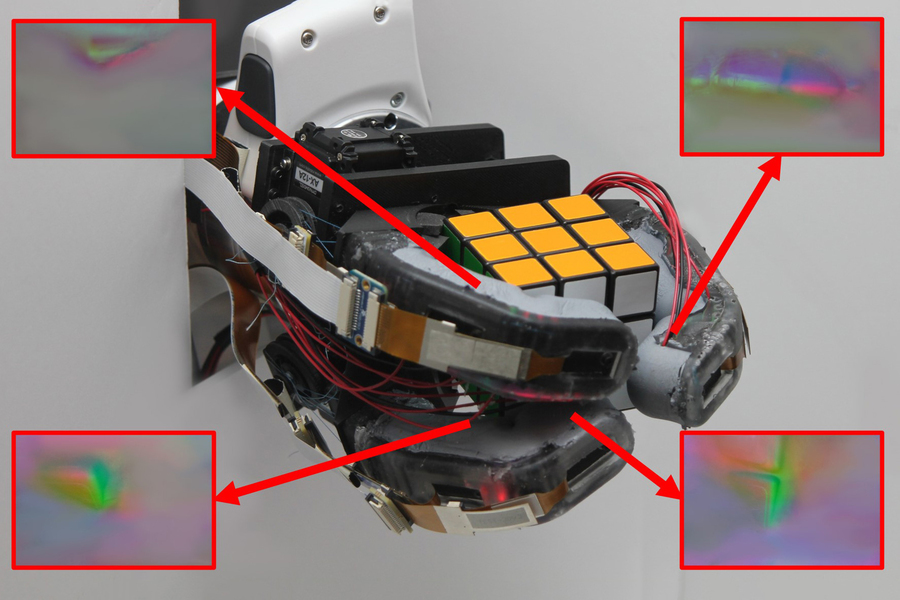 Elke vinger heeft twee cross-view camera's en zes LED's. Afbeelding: MIT Nieuws
Elke vinger heeft twee cross-view camera's en zes LED's. Afbeelding: MIT Nieuws
Wanneer een vinger een object grijpt, legt de camera vastbeeld terwijl gekleurde LED's de huid van binnenuit verlichten. Met behulp van de verlichte contouren die op een zachte huid verschijnen, voert het algoritme omgekeerde berekeningen uit om de contouren op het oppervlak van het vastgelegde object in kaart te brengen. De onderzoekers hebben een machine learning-model getraind om objecten te identificeren met behulp van onbewerkte beeldgegevens van een camera.
Meest alternatieve robotgrips gebruiken krachtige sensoren die op de vingertoppen zijn gemonteerd, merken de onderzoekers op. Daarom moet een object volledig contact met hen hebben om te worden geïdentificeerd. Andere ontwerpen gebruiken sensoren met een lagere resolutie die over de vinger zijn verdeeld, maar leggen niet zoveel details vast. Beide opties vereisen meerdere opnames om het item te analyseren.
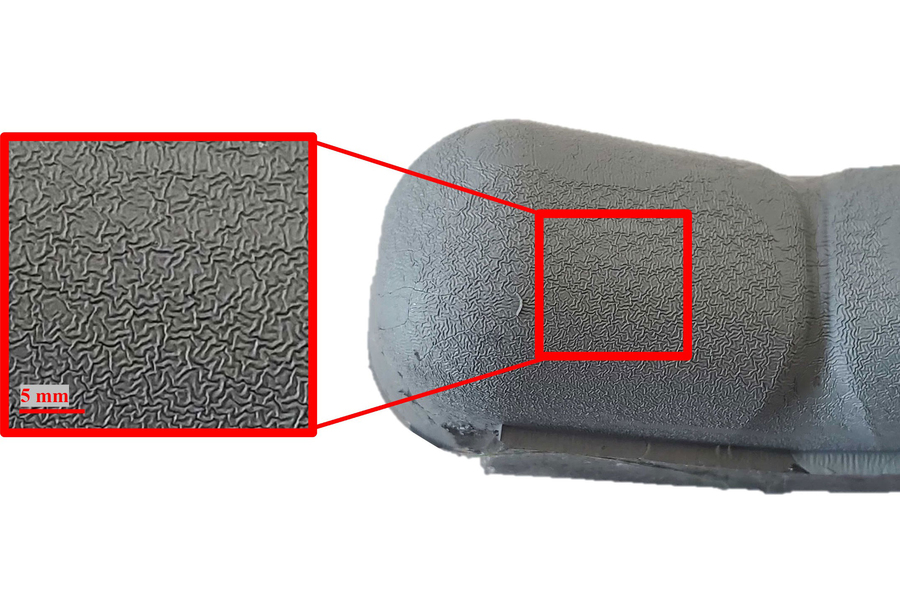 Kleine "rimpels" op het oppervlak van de siliconen helpen de vinger over het oppervlak van het object te glijden voor een betere identificatie. Afbeelding: MIT Nieuws
Kleine "rimpels" op het oppervlak van de siliconen helpen de vinger over het oppervlak van het object te glijden voor een betere identificatie. Afbeelding: MIT Nieuws
Uit het onderzoek bleek dat het nieuwe toesteléén opname is voldoende om verschillende objecten te identificeren met een nauwkeurigheid tot 85%. Tegelijkertijd maakt het stijve skelet de vingers sterk genoeg om zware voorwerpen zoals een boor op te tillen. En met zacht leer kunt u buigzame voorwerpen, zoals een lege plastic waterfles, stevig samendrukken, maar niet verpletteren.
Ons doel in dit werk was omcombineer alles wat onze menselijke handen zo goed maakt in een robotvinger die taken kan uitvoeren die andere robotvingers momenteel niet aankunnen.
Sandra Liu, co-auteur van de studie, afgestudeerde student aan het MIT
Lees verder:
Het bleek dat fotosynthese niet werkt zoals wetenschappers dachten. Nu willen ze het hacken
Een verre radiomelkweg bleek een zwart gat te zijn, dat rechtstreeks op de aarde is gericht
Een manier gevonden om gewicht en bloedsuiker te verminderen. Wetenschappers beloven het effect van een operatie
Omslagafbeelding: MIT News