Onderzoekers van het Idiap Research Institute in Zwitserland, de Chinese Universiteit van Hong Kong (CUHK) en
“Ons recente werk is een gezamenlijk werkdrie laboratoria. We bestuderen deze techniek nu zo'n tien jaar en zijn geïnteresseerd in het maken van intelligente robots die voedsel voor mensen kunnen koken", merken de onderzoekers op.
Ze besloten zich te concentreren op Chineesculinaire kunsten, in het bijzonder frituren, een techniek waarbij ingrediënten op hoog vuur worden gebakken, waarbij ze constant moeten worden geroerd. "Ondanks het feit dat dergelijke robots de afgelopen jaren al zijn ontwikkeld, is het creëren van een robotchef in een semi-gestructureerde keukenomgeving nog steeds een formidabele taak", merken de wetenschappers op.
Ze voegden eraan toe dat het nieuwe mechanisme overweegt:coördinatie als een probleem van het overbrengen van volgorde tussen de bewegingen van beide handen en gebruikt hiervoor het gecombineerde model van de transformator en GNN. Daarom wordt in een interactief proces de beweging van de linkerhand gecorrigeerd volgens de visuele feedback, en de corresponderende beweging van de rechterhand wordt gegenereerd door het vooraf getrainde structuurtransformatormodel op basis van de bewegingen van de linkerhand.
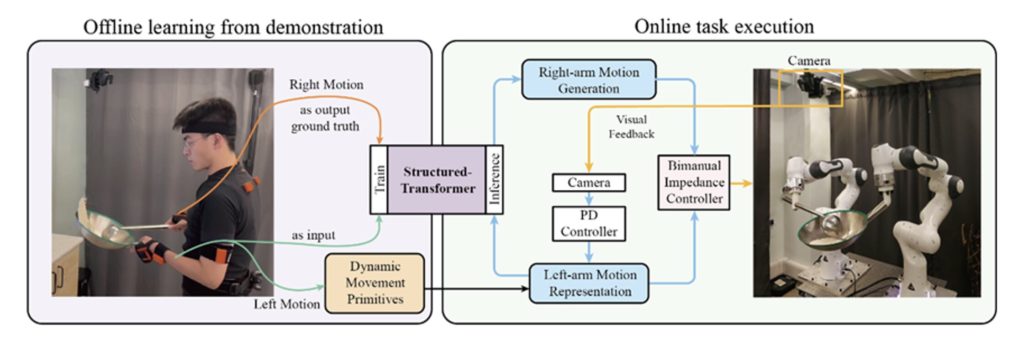
De onderzoekers beoordeelden de prestaties van hun model alssimulaties en op een fysiek robotplatform met twee handen. In deze tests stelde het model de robot in staat om met succes en realistisch de bewegingen te reproduceren die gepaard gaan met het koken van gebakken aardappelen.
In de toekomst zal het model gepresenteerd door de groeponderzoekers, de ontwikkeling mogelijk maken van robots die zowel thuis als op openbare plaatsen kunnen koken. Bovendien kan dezelfde aanpak worden gebruikt om robots te trainen voor andere taken waarbij twee armen en handen worden gebruikt.
“Nu zullen we een hogere dimensionale introducereninformatie voor het bestuderen van de bewegingen van mensachtigen bij het werken in de keuken, bijvoorbeeld visuele signalen en elektromyografische signalen, merken de wetenschappers op. "Dus zijn we ook van plan om een complexer systeem aan te bieden dat zowel de bewegingen van de bimanuele manipulatoren als de verandering in de toestand van het object omvat."
Lees verder
Quantumsimulator toonde de verdeling van een elektron in delen in een eendimensionale ruimte
Natuurkundigen hebben een atomaire laser gemaakt die voor altijd kan werken
Twee planeten niet ver van de aarde gevonden die erg op de onze lijken