Professor Edward Anderson van het Massachusetts Institute of Technology en zijn afgestudeerde student Sandra Liu
De grip bestaat uit twee flexibele geribbelde vingers,die zich aanpassen aan de vorm van het object waarmee ze in contact komen. Deze vingers zijn, net als bij veel vergelijkbare ontwikkelingen, gemaakt van flexibele plastic materialen op een 3D-printer. In hun robot verwijderden de ingenieurs echter de dwarsribben aan de binnenkant van de vingers en gaven ze stijfheid. In plaats daarvan installeerden de onderzoekers een camera en sensoren.
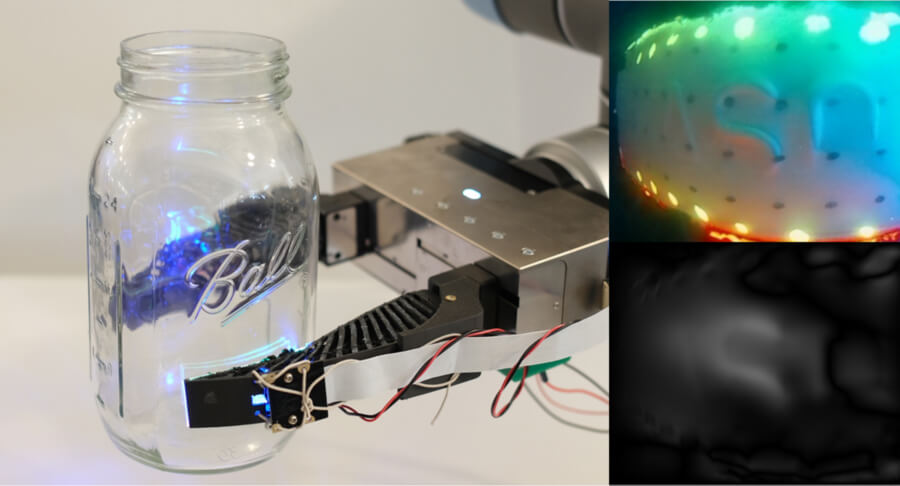
Aan de buitenkant van de holte wordt een dunne acrylplaat geplaatst, waaraan "gevoelige" siliconengelpads zijn bevestigd.In de diepte van de holte wordt een camera geplaatst die op de acryllaag is gericht en de hele holte wordt verlicht door LED's.
Wanneer u een voorwerp aanraakt, wikkelt de vinger zich er voorzichtig omheenhet, versmeltend met de contouren van het object. De camera en speciale algoritmen analyseren de verandering in siliconen- en acrylplaten. Op basis van de analyse bepaalt de robot de algemene vorm van het object, oppervlakte-onregelmatigheden, de oriëntatie van het object in de ruimte en de kracht waarmee het object moet worden samengedrukt.
De onderzoekers testten hunvastleggen door slechts één van de twee vingers elkaar aan te raken. Het apparaat dat ze creëerden manipuleerde met succes verschillende objecten, zoals een mini-schroevendraaier, een plastic aardbei, een tube verf en een glas wijn. Tegelijkertijd kon de interne sensor bij het vastleggen van aardbeien de korreligheid van het oppervlak met succes detecteren, en bij het werken met een pot kon hij de gegraveerde naam lezen.
 Bron: MIT Computer Science and Artificial Intelligence Laboratory
Bron: MIT Computer Science and Artificial Intelligence Laboratory
Zoals de auteurs van het werk opmerken, glazen objectenvormen een uitdaging voor computer vision-sensoren vanwege lichtbreking. Met tactiele sensoren kunt u deze beperking omzeilen. Toen de greep het glas optilde, voelde hij de oriëntatie van de steel in de ruimte en kon hij ervoor zorgen dat het glas naar boven wees voordat hij het op de tafel liet zakken.
Ingenieurs merken op dat het creëren van een holte binneninvinger enigszins de stabiliteit van de greep verstoord. Wetenschappers zijn van plan het ontwerp van hun apparaat af te ronden om deze tekortkoming te corrigeren. Daarnaast zijn ze van plan een drievingerige greep te ontwikkelen die bijvoorbeeld stukjes fruit kan oppakken en hun rijpheid kan evalueren.
Lees verder:
MIT creëert een stationaire warmtemotor die beter presteert dan turbines
Na tien jaar werk zetten wetenschappers vraagtekens bij het standaardmodel van de natuurkunde
Zie hoe zonsopgang eruit ziet op Mars