Ingenieurs ontwikkelen een robotarm die monsters zal verzamelen die door de rover van Mars zijn verzameld.
De architectuur van de manipulator bootst de mens naarm met schouder, elleboog en pols. Daarnaast heeft de robot zijn eigen ingebouwde "brein" en "ogen". ESA meldt dat de arm een groot bewegingsbereik kan uitvoeren met zeven vrijheidsgraden. Een hoge mate van behendigheid stelt de hand in staat om de buizen van de rover te verwijderen, ze van de Marsbodem te tillen, ze in de container te plaatsen en het deksel te sluiten voordat ze vanaf Mars worden gelanceerd.
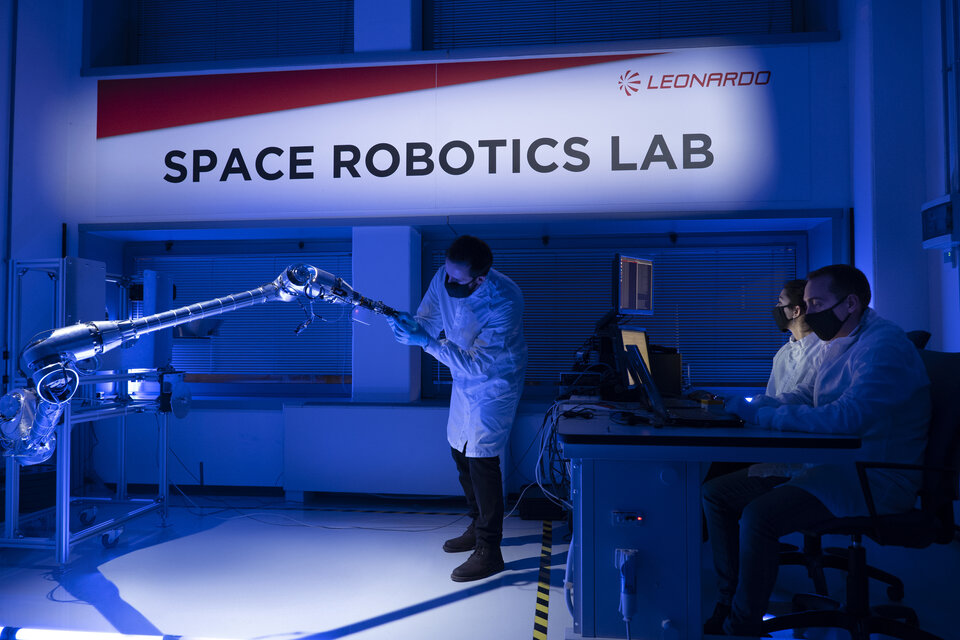 Robotarm voor de missie van Mars. Foto: Leonardo/Maxon/GMV/ OHB Italia/ SAB Aerospace s.r.o
Robotarm voor de missie van Mars. Foto: Leonardo/Maxon/GMV/ OHB Italia/ SAB Aerospace s.r.o
De robot zal worden uitgerust met twee camera's en veel sensoren. Met deze apparaten kan hij zelfstandig de beste manier van handelen bepalen en bewegingen dienovereenkomstig coördineren.
De robotarm maakt deel uit van de Mars Sample Return-missie. Het bestaat uit drie delen en heeft als doel om tegen 2033 monsters die op de Rode Planeet zijn verzameld, naar de aarde te brengen.
 Schema van de Mars Sample Return-missie. Afbeelding: EKA
Schema van de Mars Sample Return-missie. Afbeelding: EKA
Nadat de rover de nodige monsters heeft verzameld,hij zal terugkeren naar het lanceerplatform. Met behulp van een manipulator wordt de verzamelde grond in een container geladen en hermetisch verpakt. De robot zal het deksel van de container sluiten en de Marsmonsters zullen in een baan om de aarde worden gelanceerd. Daar worden ze opgepikt door de ESA Earth Return Orbiter (ERO), die het materiaal terug naar de aarde zal brengen.
Omslagafbeelding: Leonardo/Maxon/GMV/ OHB Italia/ SAB Aerospace s.r.o
Lees verder:
Natuurkundigen hebben een universele "klok" in de ruimte gevonden: ze zijn nauwkeuriger dan atomaire
Archeologen hebben tekeningen gevonden van enge mensen met enorme hoofden: wie waren dat?
De James Webb-telescoop nam de eerste foto van Jupiter: hij toont 9 bewegende doelen tegelijk