Wie zijn robots?
Een paar jaar geleden verscheen er iets cools op Reddit: wetenschappers beschreven complex
Robotica is een synergetische toegepastewerkterrein. Het bestaat uit programmeren, mechatronica en cybernetica. Mechatronica is iets dat in wisselwerking staat met de echte wereld. En cybernetica is een multi-link wetenschap, die in de eerste plaats het beheer van gemaakte programma's omvat.
Wat is een robot?15 jaar geleden zouden velen hebben gezegd dat dit een robotarm is die in een fabriek werkt en las of schildert. Een ander populair antwoord is de Android-robot uit de filmwereld. Maar is een rijdende kar of een onbemand voertuig een robot? Ja, dit is ook een van de gebieden van robotica. Vliegtuigen zijn ook robots, enkele van de nieuwste ontwikkelingen omvatten intelligente technologieën en zijn in feite autonome robots.
 De mobiele kar is ook een robot
De mobiele kar is ook een robot
Er is ook zo'n gebied van robotica als veldrobotica - "mobiele robotica". Dit omvat alle robots die in een veld, gebouw of onder water bewegen. De meest interessante toepassing is naar mijn mening de landbouw.
Geschiedenis van vliegtuigen
De geschiedenis van vliegtuigen begon in het verledeneeuw. Daarvoor vlogen alleen ballonnen zonder motor, en het was moeilijk om ze robots te noemen. Aan het begin van de vorige eeuw functioneerden er twee soorten vliegtuigen: luchtschepen en vliegtuigen. De eerste gecontroleerde vlucht werd gemaakt door de gebroeders Wright. Bovendien verscheen de eerste automatische piloot vrij snel, bijna 10 jaar daarna hielp het om de vlucht te stabiliseren.
De huidige richting van robotica is gerelateerd aan:ontwikkeling en beschikbaarheid van nieuwe open stuurautomaten zoals PixHawk (PixHawk is open hardware voor controllers, drones en andere UAV's. Het wordt gebruikt voor academische, amateur- en professionele doeleinden). Een voorbeeld van de komst van drones in het leven van ieder mens is de bezorging van pizza door het bedrijf Dodo Pizza samen met Copt Express, dit gebeurde in 2014.
 Geschiedenis van vliegtuigen
Geschiedenis van vliegtuigen
Hoe de drone wordt bestuurd
Moderne vliegtuigen gebruiken er eenvan de drie principes van het creëren van lift - aerostatisch, jet of aerodynamisch. Het aerodynamische principe van vliegen en het creëren van lift (een deel van de lucht naar beneden gooien) kan worden geïmplementeerd door de beweging van het hele apparaat, uitgerust met een vast lageroppervlak (vleugel), of door de beweging van afzonderlijke lagerdelen van het apparaat (hoofdrotor, ventilator) ten opzichte van de lucht.
 Hoe apparaten vliegen
Hoe apparaten vliegen
De drone heeft een propeller die lift creëert.Nadat het van de grond is gekomen, begint het apparaat de propeller sneller te bewegen en gaat het omhoog. Maar de actiekracht is gelijk aan de reactiekracht. Wanneer de propeller draait, wordt er een moment in de tegenovergestelde richting gecreëerd - dit is het ontwerp van helikopters en helikopters. Als de helikopter één propeller heeft, is deze niet stabiel. Daarom gebruikt het apparaat een schema met twee rotoren of een staartrotor.
De quadcopter heeft een zeer eenvoudig ontwerp -het heeft meestal vier schroeven, waarvan er twee in de ene richting draaien en twee in de andere richting. Als de gebruiker vooruit moet, draaien sommige propellers langzamer terwijl andere sneller draaien. En als de gebruiker wil draaien, versnellen sommige diagonaal geplaatste schroeven, terwijl andere vertragen.
 Hoe een quadcopter vliegt
Hoe een quadcopter vliegt
De bewegingen van de helikopter in de hoeken houden verband met de beweging langscoördinaten. Als de piloot vooruit wil, moeten we de drone eerst naar voren kantelen en vervolgens, terwijl het elektrische apparaat naar voren trekt, stabiliseren op het punt waar we willen blijven.
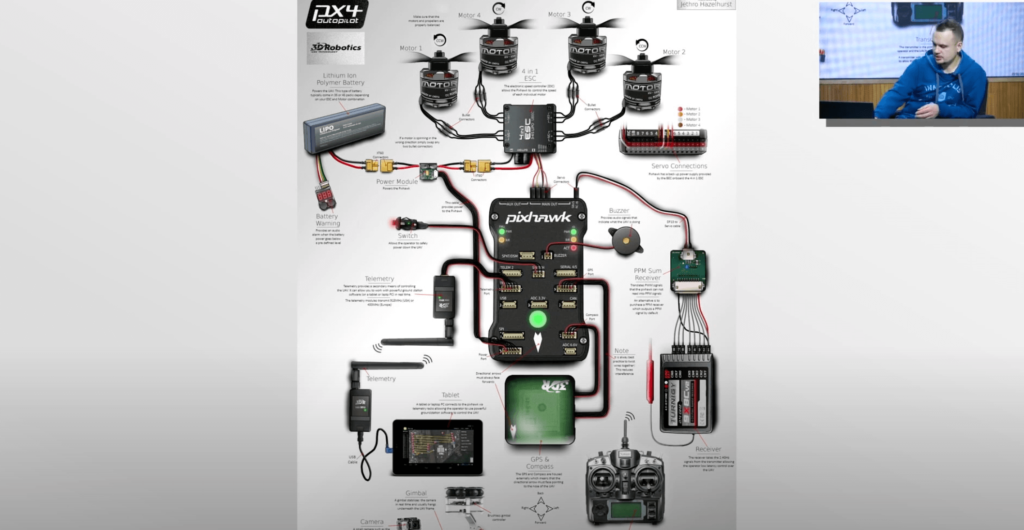
Dit is een diagram van een van de meest populaire stuurautomaten,op basis waarvan nieuwe apparaten gemaakt kunnen worden. Het maakt verbinding met alle motoren en sensoren. Bovendien hebben de motoren hun eigen regeleenheid, de ESC-regelaar - Electronic Speed Controller, die het toerental van de motor regelt.
Van de sensoren is er GPS zodat de drone kanwerk buitenshuis, vlieg naar punten en stabiliseer de positie. Maar in de stuurautomaat zelf bevindt zich ook een IMU - een traagheidssensormodule waarmee het houdingshoeken kan bepalen. Er is ook een communicatiekanaal, een grondbedieningsstation en een batterij.
 UAV-apparaat
UAV-apparaat
Zoals hierboven vermeld, is er een niveaumotorregeling - we kunnen zonder aarzelen de rotatiesnelheid instellen. De rest van de niveaus werken volgens hetzelfde principe: de volgende is oriëntatiecontrole.
Maar eerst moeten we de rotatiesnelheid regelen- FPV-helikopters vliegen op dit niveau (apparaten waarmee u het beeld van de camera van de drone in realtime kunt bekijken vanaf de eerste persoon (FPV - First Person View). Ervaren piloten stellen de rotatiesnelheid in en sturen constant met de joystick. De volgende fase is wanneer de gebruiker de hoek kan stabiliseren, maar de drone zal nog steeds bewegen. Het volgende is snelheidsregeling, en de hoogste is positiecontrole, manoeuvres om naar een punt te gaan of langs een bepaald traject te bewegen.
Wie wil programmeren, bouwen encontrole drones - let op de PIX4 open source stuurautomaat. Er is een hele gemeenschap rond luchtrobotica (ROS - robotic operating system, of Open robotics), er zijn simulatoren voor drones. Daarom kunnen veel experimenten in de simulator worden uitgevoerd zonder de drone zelf te hebben.
Ontwikkelingsstadia van drones
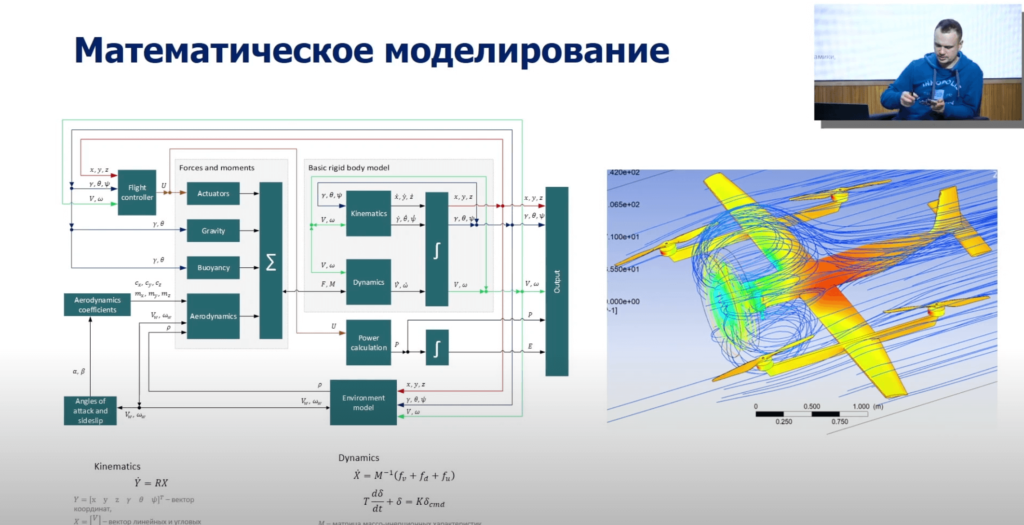
Onderzoekers beginnen met een conceptueelmodellering, en dan moeten ze een nauwkeurig model van het apparaat bouwen. Zonder op de formule in te gaan: een helikoptermodel is in wezen een rigide lichaamsmodel. Dit is de tweede wet van Newton, uitgebreid tot systemen van deeltjes. Het heeft translatie- en rotatiebewegingen, er is kinematica en bewegingsdynamiek, en om het model van een specifiek apparaat te beschrijven, moeten we hier de vergelijking toevoegen van krachten die op een specifieke drone inwerken.
 Hoe UAV's worden gemodelleerd
Hoe UAV's worden gemodelleerd
De volgende stap is om het systeem te ontwikkelenbeheer. Als we op de klassieke manier gaan: eerst ontdekken we het exacte wiskundige model en op basis daarvan synthetiseren we al het besturingsalgoritme of nieuwe formules. Alle niveaus kunnen in het besturingssysteem worden opgenomen: bewegingsplanning, omgevingsbeleving, toestandsschatting met behulp van sensoren. Met algoritmen kunnen we onze coördinaten en gegevens verfijnen.
 Drone controlesysteem
Drone controlesysteem
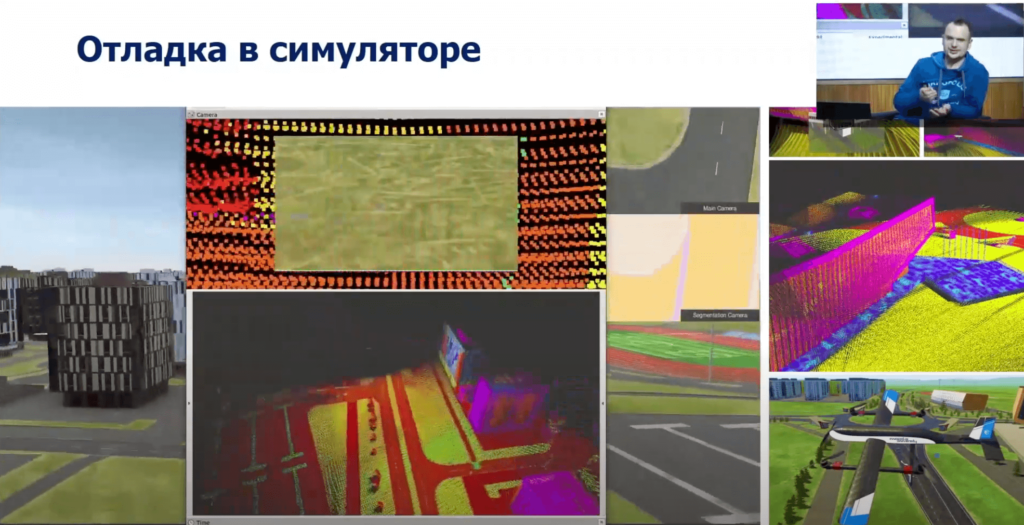
Als er een controlealgoritme is, kan dit onmiddellijk zijntoepassen, maar dit is vrij duur. Apparaten crashen bij de geringste fout - hiermee moet rekening worden gehouden en er moeten back-ups worden gemaakt. Voor het testen worden simulatoren gebruikt.
Hieronder vindt u een virtuele tour door Innopolisis een product van onze universiteit, het is beschikbaar om te downloaden op GitHub. Dit is niet alleen een visueel onderdeel, maar ook de gegevens van alle sensoren van het apparaat. Het heeft alle positiesensoren, het wordt bestuurd als een drone en kan alle besturingsalgoritmen debuggen.
 Hoe drones leren in simulatie
Hoe drones leren in simulatie
Wanneer op basis van ervaring met de simulator verschijntmeer vertrouwen - u kunt overgaan tot hardware-implementatie. De componenten worden hier getoond: de vervaardiging van het apparaat van koolstof en composiet, het maken van elektronica, de plaatsing van motoren, hun bevestiging.
Tests beginnen niet op straat:Eerst worden de apparaten getest op een ophanging of een speciale standaard. Ze kunnen worden gebruikt om elementen van de werking van een onbemand luchtvaartuig te debuggen. Hier wordt bijvoorbeeld een verticaal start- en landingsvliegtuig getoond - dit is een hybride van een helikopter en een vliegtuig; in de video kun je zien hoe het omgaat met externe verstoringen en een hoek behoudt. Aan de rechterkant zie je een behoorlijk gek experiment waarbij je vijf motoren tegelijk start en ziet hoe het besturingssysteem daarmee omgaat.
 Hoe drones worden gebouwd
Hoe drones worden gebouwd
Na het testen gaan ze verder met vluchten -kleine starts bij lage snelheden, gecontroleerde beweging met een piloot die de controle kan overnemen. Het slotakkoord is een volledig onbemande vlucht.
Het apparaat stijgt verticaal op -‘als een helikopter’, waarna de hoofdmotor wordt ingeschakeld, de drone accelereert, overschakelt naar de vliegtuigmodus en voldoende snelheid ontwikkelt om de vleugel te laten werken. Vervolgens worden de contourpropellers uitgeschakeld en vliegt het als een vliegtuig - het landingsproces wordt in omgekeerde volgorde uitgevoerd.
Wat is er aan de hand met drones
Een van de taken die modernewetenschappers - obstakels tijdens de vlucht omzeilen. Sommige drones weten al hoe ze dit moeten doen, maar de taak is iets breder - je moet de apparaten leren zo snel mogelijk te bewegen in een omgeving met obstakels. En er is nog ruimte om de algoritmen na te streven en te verbeteren.
Een ander voorbeeld van zo'n test is een vlucht naarWoud. Er is een zeer interessante benadering - hier worden niet alleen nieuwe algoritmen gebruikt, maar ook sensoren - een evenementencamera. Dit is een camera met een zeer hoge frequentie die het verschil tussen frames in elke tijdseenheid doorgeeft: hierdoor kun je snel obstakels controleren en erop reageren.
Op het gebied van drone motion planning,concurrentie: wie doet het sneller. De taak is om een onbekend gebied in kaart te brengen, de driedimensionale weergave ervan te bouwen en er objecten op te vinden. We vlogen op de universiteit, maar losten ook het probleem van het vinden van objecten op. Onze resultaten waren zelfs beter dan de bekende gepubliceerde algoritmen.
Er zijn wedstrijden in de race van drones.Ze zijn gemaakt op apparaten met een camera, wanneer de piloot een bril heeft en hij de drone bestuurt om zo snel mogelijk door de poort te vliegen. Een behoorlijk spectaculair evenement, waarbij dezelfde taak in de automatische modus moet worden uitgevoerd. Helaas is de computer er tot nu toe in geslaagd om een persoon alleen in het schaken te verslaan en heeft de drone-robot een menselijke piloot niet kunnen inhalen, hoewel de vooruitgang al behoorlijk serieus is. Een drone kan met behulp van een machine vision-algoritme dergelijke taken uitvoeren, het werk is alleen om de snelheid te verhogen.
Een andere wedstrijd is Microsoft Games ofdrones, het wordt uitgevoerd in een simulator. In hetzelfde gebied wordt een van de beroemde toonaangevende wedstrijden in Saoedi-Arabië gehouden. Deelnemers worden daar drie jaar van tevoren geworven.
Voor droneshows worden onbemande apparaten ingezet- Dit zijn spectaculaire evenementen die tegenwoordig een vervanging voor vuurwerk zijn geworden. Maar dat is niet het enige groepsgebruik: ze kunnen een groter gebied inspecteren.
Waar van toepassing
Zodat het er niet uitsluitend wetenschappelijk uitzietontwikkeling, hieronder is een demo van de Skydio-drone. Nu is dit het meest geavanceerde apparaat in termen van autonomie. Dit is een voorbeeld van hoe moderne technologieën - cartografie, het vermijden van obstakels, verkeersplanning samen worden gebruikt in een product dat al beschikbaar is voor de gebruiker.
Een andere richting zijn nieuwe ontwerpenvliegtuigen. Eén daarvan zijn opvouwbare drones. Eén zo'n apparaat kan na een ongeval in krappe ruimtes vliegen voor inspectie. Een ander voorbeeld is een drone die zich kan ontvouwen. Hij kan bijvoorbeeld uit een smalle pneumatische buis vliegen en dan zoals gewoonlijk vliegen.
We hebben ook een project in dit gebied - dit iszachte tensodron. Dit is de eerste softshell-drone die vliegt. Het plezier is dat je hem kunt laten vallen en hij blijft intact. Bovendien kunt u de lengte van de balken, de spanning van de kabels, wijzigen.
Twee voorbeelden die tot leven zullen komenspoedig. Ten eerste de bezorging met drones. Nu is er een zeer interessante implementatie waarbij we een pakketterminal en een drone-landingsstation combineren - in dit geval hoeven we ons geen zorgen te maken over wanneer de drone zal aankomen, waar hij zal landen, zodat we er op een tijd en haal de lading op voordat deze wordt gestolen. Het tweede voorbeeld is een vliegende taxi. Dit is het meest opwindende ontwikkelingsgebied en er zijn al werkende prototypes. Maar dit zal pas in het komende decennium gebeuren.
Welke ontwikkelingen op het gebied van vliegende taxi's zijn er de afgelopen 6 jaar geweest:
- Het bedrijf "Hover" presenteerde een apparaat metgeluidsarme elektromotor en compacte afmetingen - zoals een auto. Hij stijgt op tot een hoogte van 150 m en landt op een standaard parkeerplaats. De drone is ontworpen voor twee passagiers, het maximale laadvermogen is 300 kg en de snelheid is 200 km/u.
— In 2016 heeft het Russische bedrijf Hoversurftoonde een hoverbike die je bij je kunt dragen en op elk moment kunt opstijgen vanaf een gewone stadsparkeerplaats. Hij bereikt snelheden tot 100 km/u en de hefhoogte is om veiligheidsredenen geforceerd beperkt tot 5 meter.
— In 2018, ontwikkeld door Airbus-passagierHet Alpha One VTOL-vliegtuig klom naar een hoogte van 5 meter en bleef 53 seconden in de lucht. De gebruiker kan de UAV via de applicatie bellen en van het ene punt naar het andere gaan, zowel binnen de stad als daarbuiten.
— In 2020 maakte CityAirbus luchttaxieerste vrije vlucht. Tests vonden plaats in de buitenwijken van Parijs, de stad Ile-de-France. Het CityAirbus-vliegtuig kan zich met snelheden tot 120 km/u verplaatsen over een afstand tot 30 km. Het gewicht van de vliegende taxi is ruim 2,2 ton, CityAirbus is uitgerust met drie passagiersstoelen en één bestuurdersstoel.
- In 2022 introduceerde de Chinese startup Pantuo Aviation de T1, een vliegende taxi demonstrator met een luchtkanaal. Hij vliegt met snelheden van meer dan 300 km/u en heeft een bereik van 250 km.
Lees verder:
De ruimtesonde vloog 200 km van Mercurius. Kijk wat hij zag
Wetenschappers ontdekken hoe vitamines de incidentie van kanker beïnvloeden
Chinese gedachtenlezende helm luidt alarm wanneer iemand porno-inhoud ziet