Ingeniører fra University of Cambridge har utviklet en myk robothånd trykket på
Forskerne brukte tryktEn antropomorf hånd implantert med taktile sensorer i en 3D-printer slik at hånden kan "føle" hva den berører. Hånden var kun i stand til passiv bevegelse basert på håndleddet. "Den store fordelen med denne designen er bevegelsesområdet som vi kan få uten å bruke noen aktuatorer," sier forfatterne.
Trening av en "passiv" robotarm. Video: University of Cambridge
Forskere utførte mer enn 1200 tester med en robotarm,ser på hennes evne til å gripe små gjenstander uten å miste dem. Opprinnelig ble roboten trent ved å bruke små 3D-trykte plastkuler og grep dem ved hjelp av forhåndsbestemte handlinger avledet fra menneskelige demonstrasjoner.
Roboten brukte prøving og feiling for åfinne ut hvilken fangst som vil være vellykket. Etter å ha fullført balltreningen prøvde han å ta tak i forskjellige gjenstander, inkludert en fersken, en datamus og en rull med bobleplast. I disse testene klarte hånden å gripe 11 av 14 objekter.
Fange gjenstander av forskjellige størrelser, former og teksturer- en oppgave som er enkel for en person, men vanskelig for en robot. De fleste av dagens avanserte roboter er ikke i stand til å utføre manipulerende oppgaver som små barn enkelt kan håndtere. For eksempel vet folk instinktivt hvor mye kraft de skal bruke for å løfte et egg, men for en robot er dette et problem: ikke sterk nok vil føre til at gjenstanden faller, for sterk vil knekke egget.
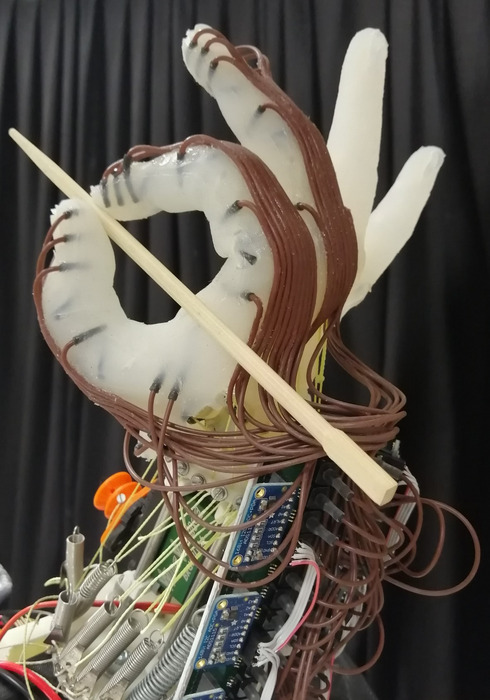 Prototype robotgriper. Bilde: University of Cambridge
Prototype robotgriper. Bilde: University of Cambridge
Sofistikert teknologi med motoriserte fingrekrever en betydelig mengde energi og et stort antall komplekse og dyre aktuatorer for hver ledd. Det passive grepet foreslått av ingeniørene gjør roboten mye enklere å kontrollere og mye mer energieffektiv. Forskerne mener at deres tilpasningsdyktige design kan brukes til å utvikle lavkostrobotikk som er i stand til mer naturlige bevegelser.
Les mer:
Se på kartet over Mars med høyeste oppløsning: 110 000 bilder og 5,7 billioner piksler
"Hav" av kvarker inne i ett proton: hva består en elementær partikkel av
Nytt bilde av Hubble forvirret forskere
På omslaget: en prototype robotgriper. Bilde: University of Cambridge