Forskere fra det italienske teknologiske instituttet har presentert en prototype av en trebent robot som
MARM robotplattformen består avsentral kropp, tre lemmer og en spesiell dokkingenhet. Sistnevnte brukes til å lade enheten og utveksle data. Når de lager en robot, har forskere sørget for muligheten til å arbeide både i nærvær av tyngdekraft og i mikrogravitasjon.
Robot MARM. Video: IIT
MARM-roboten kan bruke tre lemmer tilbevegelse ved å ta tak i standardforbindelser på stasjonsflater og krype over dem. Den kan også sette sammen og posisjonere ulike enhetskomponenter, for eksempel å flytte og installere de 1,2 m brede modulære sekskantede platene som brukes på ISS, og manipulere orbitale plug-ins.

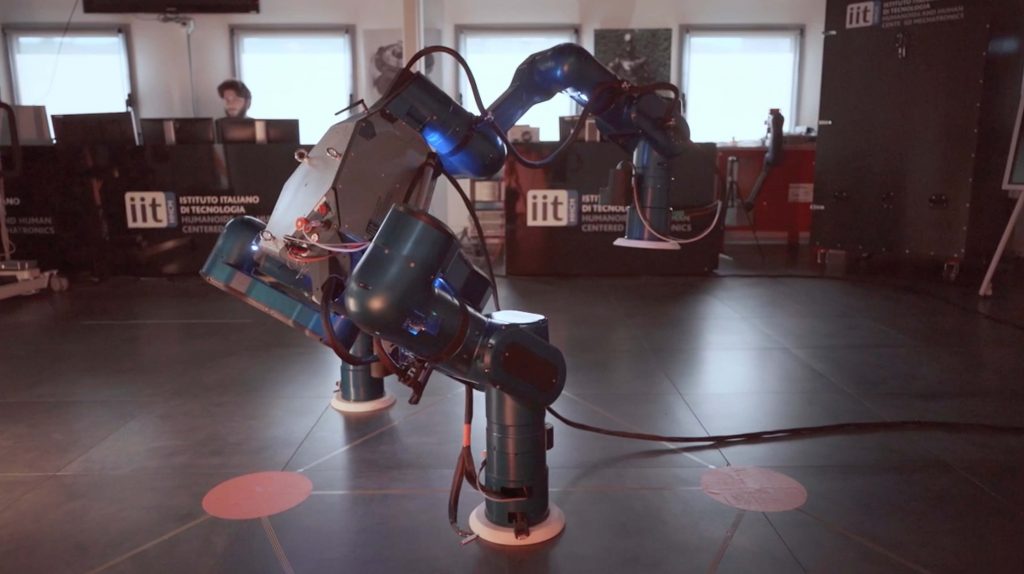
Robot MARM. Bilder: IIT
Konfigurasjon med tre lemmer – grunnleggendeforskjellen mellom den nye roboten og tidligere utviklinger. Dette gir ifølge ingeniører større fleksibilitet i driften av enheten. For eksempel kan han bruke to "hender" til å jobbe, holde seg på overflaten ved hjelp av den gjenværende.
Forskere foreslår å bruke MARM tilhente varer fra lageret, flytte dem til rett sted, samle og plasser dem. Prototypen vil bli testet i mikrogravitasjon med dette scenariet i tankene, hvoretter en fungerende versjon vil bli laget for å sendes til ISS.
Les mer:
Forskere fra permafrostsonen: hvordan de utvikler smarte klær og en kreftvaksine
To planeter er funnet ikke langt fra jorden. Kanskje de er bebodd
Forskere har funnet ut hvem som tjente på dinosaurenes død