Utviklerne har skapt et helautomatisert system som lærer under normalen
«I dette systemet lærer brukeren og systemet av hverandre samtidig. Dette har potensial til å forbedre komforten og påliteligheten til robotproteser, sier Yeng.
Forskningsresultater publisert i tidsskriftetIEEE Transactions on Biomedical Engineering har blitt validert i et virtuelt miljø. De ble sammenlignet med eksisterende systemer. Etter vellykkede tester testet forskerteamet brukergrensesnittet og toppmoderne proteser ved Imperial College London. Utviklerne ba en amputert flytte klesklypene: tester som dette er mye brukt av fysioterapeuter for å vurdere funksjonen til de øvre lemmer.
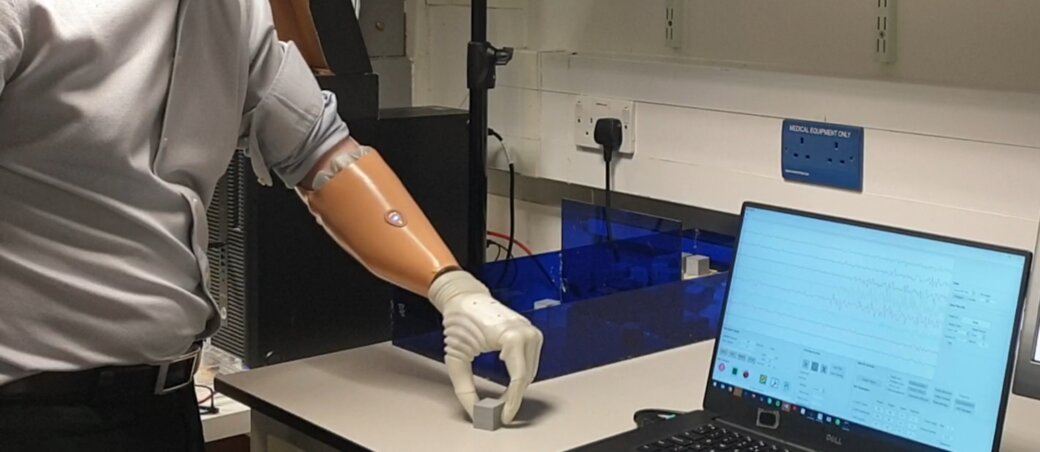 En moderne armprotese kontrollert av muskelaktivering. Aalto-universitetet
En moderne armprotese kontrollert av muskelaktivering. Aalto-universitetet
Systemfunksjonalitet er studert gjennom kontrollerte og standardiserte tester, men brukerbehov identifiseres best gjennom kvalitative longitudinelle studier.
– For den fremtidige utviklingen er det svært viktig å fortsette samarbeidet med legesentre og brukere av proteser, sier Yeng.
Folk som har fått amputert øvre lemmerkan kontrollere en robotprotese ved å trekke sammen de gjenværende musklene. Forbindelsen der protesen fanger opp de elektriske signalene som produseres av muskelen er kjent som det myoelektriske grensesnittet. De mest avanserte protesene bruker maskinlæringsalgoritmer for å hjelpe til med å tolke disse brukergenererte signalene. Imidlertid er disse bindingene ofte svært følsomme for eksterne faktorer, som svette, og svekkes over tid. For å løse dette problemet tilbyr forskningsmiljøet ulike algoritmer som bedre kan tilpasse seg endrede omstendigheter.
Les mer:
Forskere har funnet de sunneste menneskene på jorden: alt handler om en unik livsstil
Faren for gratis VPN-er. Hvorfor kan de ikke lastes ned og hvordan beskytter du deg selv?
Fysikere har gjenskapt evnene til T-1000 fra "Terminator-2" i laboratoriet