Ingeniører fra École Polytechnique Fédérale de Lausanne har utviklet en metode som lar en robot
Ornithopter landing. Video: EPFL
Å lande en fugl på en gren ser ut til å være en av de mestnaturlige prosesser. Men faktisk krever det en ekstremt presis balanse mellom tid, slagkraft, hastighet og bevegelsesnøyaktighet, noterer forfatterne av utviklingen. Ikke overraskende, til nå har ingeniører ikke vært i stand til å reprodusere disse bevegelsene i roboter.
 Ornithopter landingssystem. Bilde: Raphael Zufferey et al., Nature Communications
Ornithopter landingssystem. Bilde: Raphael Zufferey et al., Nature Communications
Forskere har løst problemet med presis balanseutstyre ornithopteren med en datamaskin ombord og navigasjonssystem. Den bruker eksterne kilder for å fange opp bevegelse og bestemme posisjonen til enheten. Ornitopterens klobeinvedheng ble nøyaktig kalibrert for å kompensere for opp-og-ned-vibrasjoner under flyging da dronen prøvde å ta tak i en abbor.

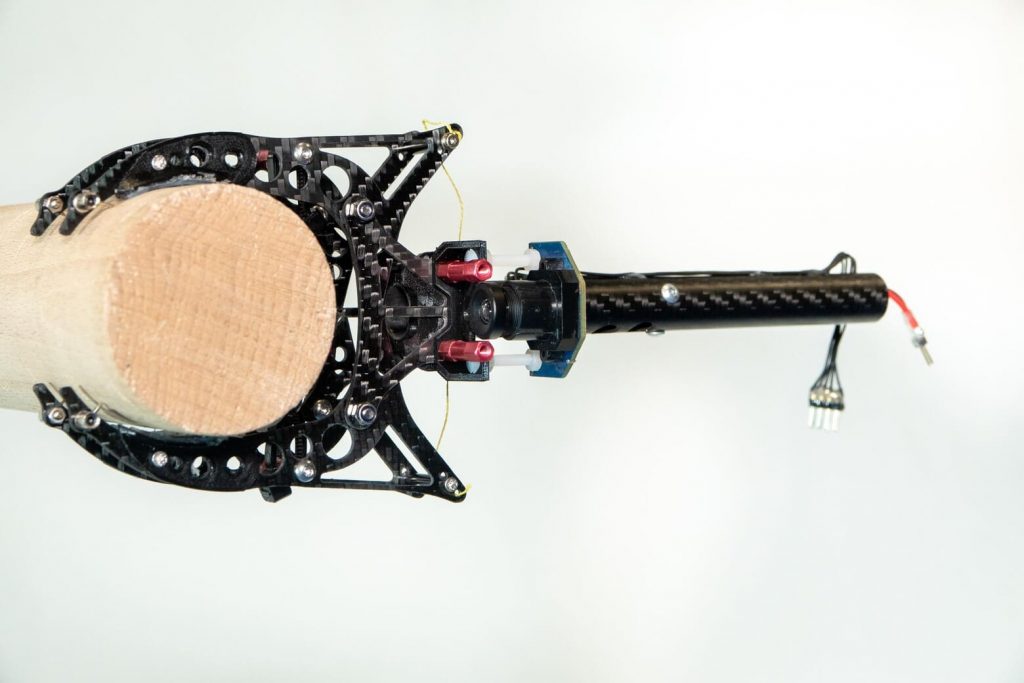
Ornithopter feste. Bilde: EPFL
Selve kloen ble utformet på en slik måte atabsorbere momentum av robotens bevegelse ved støt, og lukke raskt og sikkert for å støtte vekten. Når roboten først er på abboren, holder den seg på abboren uten å bruke energi. Forskerne gjennomfører for tiden flytester i laboratoriet.
En gang lærer ornitopteren på egenhåndlander på en tregren, vil den kunne utføre visse oppgaver, som for eksempel å innhente biologiske prøver diskret eller ta målinger fra treet. Til slutt kan det til og med lande på menneskeskapte strukturer, noe som kan åpne for nye bruksområder.
Raphael Zufferey, medforfatter av utviklingen
Les mer:
To planeter er funnet ikke langt fra jorden. Kanskje de er bebodd
En unik meteor skrev om historien til solsystemet: hvor kom den fra
Prototypemodulen til den nye ISS ble sprengt i NASA-senteret. Se hvordan det var