For å utvide mulighetene til autonome ubemannede luftfartøyer (UAV), forskere og ingeniører
Modellen heter Agilicious, og forskernehevder det kan gjøre quadcoptere mer i stand til å navigere i hindringer og spore baner selv i høye hastigheter under sine reiser. Dessuten er modellen nyttig både i ekte flyreiser og i virtuelle simuleringer.
"Ved åpen kildekode Agilicious gir viforsknings- og industrisamfunn tilgang til en svært fleksibel, allsidig og utvidbar quadcopter-plattform," sa forskerne.
Kilde:
Vitenskapelig robotikk
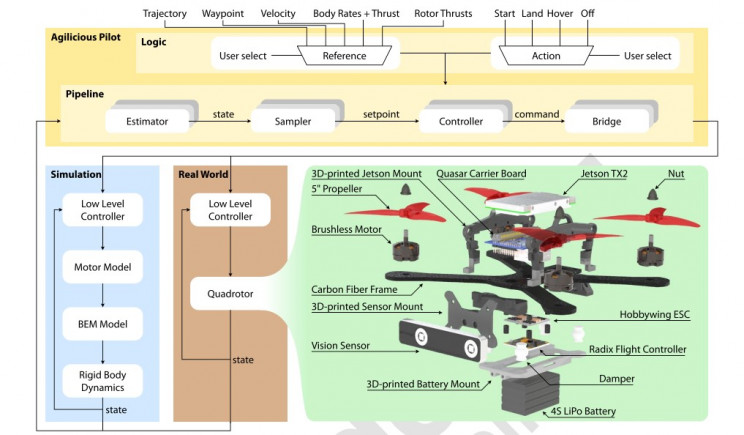
I deres Agilicious-plattform brukte deavanserte synssensorer om bord, flyovervåkingssystemer og andre komponenter. De forbedret til slutt drone-sanntidsoppfatning, banesporing og flyplanleggingsferdigheter.
I tillegg er plattformen også utstyrt med NVIDIAJetson TX2, en kraftig og energibesparende kunstig intelligens-modul som utfører komplekse beregningsoppgaver for å støtte maskinvarefunksjonene.
Les mer:
Den unge stjernen "gjemt" noe som endret synet til forskere om universet. Hovedtingen
Forskere avdekker hvordan vitaminer påvirker forekomsten av kreft
En enkel måte å gå ned i vekt i en drøm vil snart bli testet på frivillige