Fiskestimer viser kompleks, synkronisert atferd som hjelper dem å finne mat, migrere og
Denne typen desentralisert, autonomselvorganisering og koordinering har lenge tiltrukket forskere: de bestemte seg for å bruke det i robotikk. Et team av forskere fra Harvard School of Engineering and Applied Sciences. John A. Paulson (SEAS) og Wyss Institute for Biological Engineering har utviklet fiskeinspirerte roboter som kan synkronisere bevegelsene deres.
Roboter jobber ofte på steder somutilgjengelige eller farlige for mennesker, og områder hvor menneskelig inngripen kanskje ikke en gang er mulig. I slike situasjoner må du virkelig ha en svært autonom robotsverm. Ved å utnytte fiskens atferdsmessige ferdigheter og 3D visuelle persepsjon, klarte vi å lage et system som har en høy grad av autonomi og fleksibilitet under vann.
Florian Berlinger, Ph.D. kandidat ved SEAS og Wyss og førsteforfatter av papiret
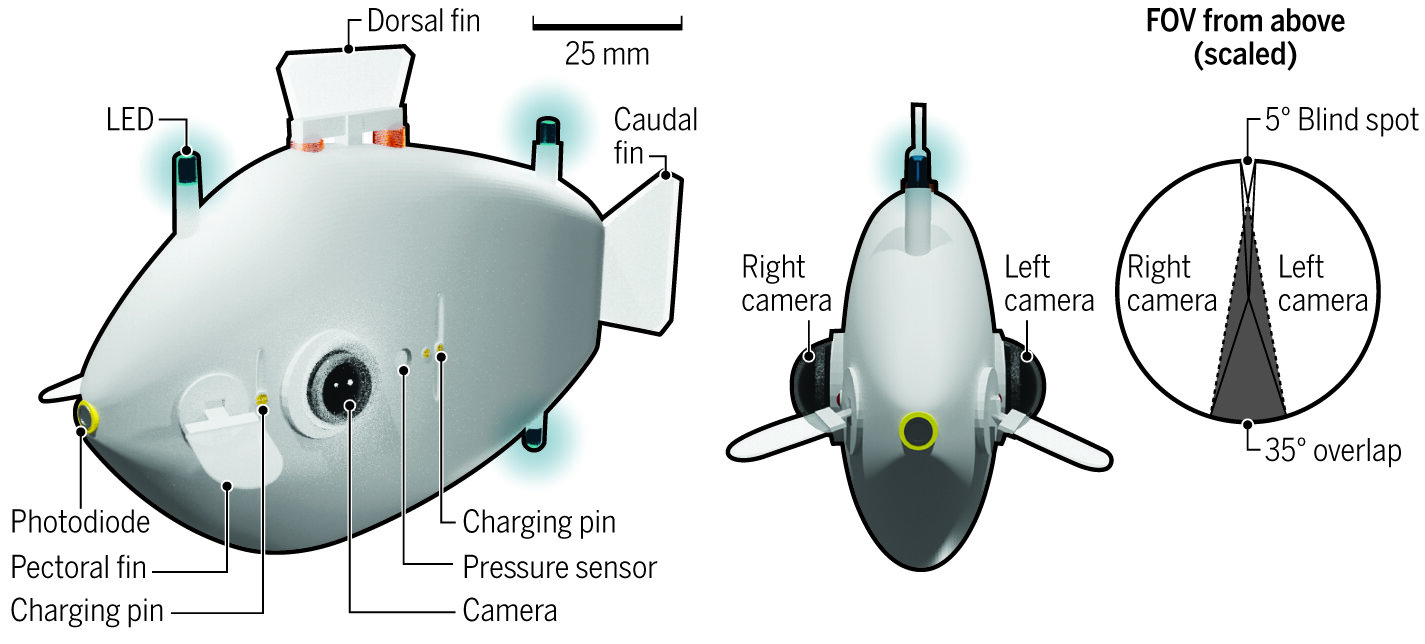
En robotsverm inspirert av fisk har fåttnavn Blueswarm. Forskere har utviklet et visjonsbasert koordineringssystem basert på blå lysdioder. Hver undervannsrobot er utstyrt med to kameraer og tre LED-lys. Kameraer ombord registrerer LED-lysene til fisk i nærheten og bruker en spesiell algoritme for å bestemme deres avstand, retning og kurs.
Så Blueswarm kan utvise kompleks selvorganisert oppførsel: spesielt aggregering, spredning og sirkeldannelse.
Les mer
Abort og vitenskap: hva vil skje med barna som skal føde
Forskning: mennesker vil ikke kunne kontrollere superintelligente AI-maskiner
Sjekk ut de vakreste bildene av Hubble. Hva har teleskopet sett på 30 år?