Facebook vil bruke datasyn og naturlige språkbehandlingssystemer som allerede er det
Roboten er planlagt å være helt autonom.og selvlæringssystemer må lære direkte fra rådataene. Dette vil gjøre det mulig for enheten å tilpasse seg nye utfordringer og endre omstendigheter, mener selskapet. Grunnlaget for kunstig intelligens vil være læring basert på RL-modellen, som vil tillate robotter å lære selvstendig gjennom prøving og feiling.
Vi vil gjerne lære roboten å gå uten hjelp. Bevegelse er en svært vanskelig oppgave i robotteknologi, og dette gjør det veldig spennende, fra vårt synspunkt.
Facebook Forskningsutvikler Roberto Calandra
Et karakteristisk trekk ved roboten fra Facebooker at enheten ikke vil bli implementert algoritmer for bevegelsen sin. I utgangspunktet kan han ikke gå, men etter hvert bruker han algoritmen, begynner han å samhandle med sine kontrollører, som allerede kan aktiveres for bevegelse. Jo mer erfaring en robot får, desto bedre fungerer det.

I dette tilfellet må roboten ikke bareBestem plassering og orientering i rommet, men hold balansen og koble sensorenes impulser med hverandre for riktig drift av komplekse mekanismer som kneet.
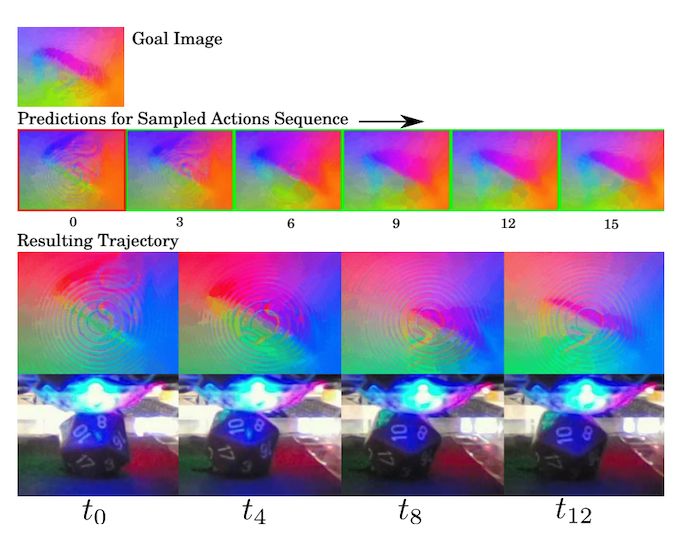
Roboter fra Facebook for datasynbruke en av algoritmene som ble utviklet for å forutsi populariteten til videoer. Et nevralt nettverk kan analysere flere sekunder med video og forutsi flere bilder selv uten visning for å fremskynde analysen av en enorm mengde materiale.
Som en del av Facebook Research-eksperimentetintroduserte den første enheten - en manipulator som kan fungere med en joystick, kaster en terning med 20 fasetter og forstår riktig resultatene som falt i ett sekund eller et annet.
Kombinere visuelle og taktile informasjonskilder kan forbedre læringsmetoder og funksjonalitet for fremtidige selvlærende plattformer, ifølge Facebook.
Ifølge utviklerne, nå lignendeprosjekter bruker bare én type (maksimalt to) informasjon, mens for at robotenheter skal fungere fullt ut, må de oppfatte informasjon fra forskjellige sanser.