Professor Edward Anderson fra Massachusetts Institute of Technology og hans doktorgradsstudent Sandra Liu
Grepet består av to fleksible ribbede fingre,som tilpasser seg formen på gjenstanden de er i kontakt med. Disse fingrene, som i mange lignende utviklinger, er laget av fleksible plastmaterialer på en 3D-skriver. Men i roboten deres fjernet ingeniørene de tverrgående ribbene på innsiden av fingrene og ga dem stivhet. I stedet installerte forskerne et kamera og sensorer.
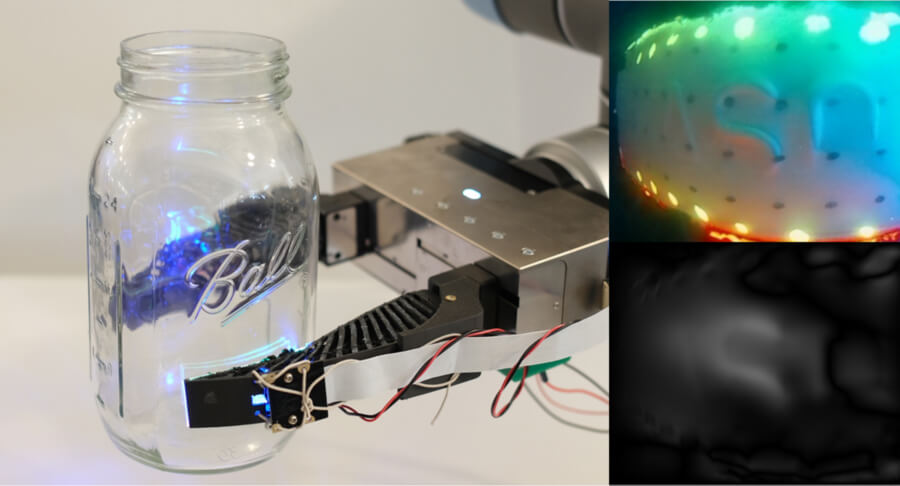
En tynnet akrylplate som "sensitive" silikongelputer er festet til. Et kamera er plassert dypt i hulrommet, rettet mot akryllaget, og hele hulrommet er opplyst av lysdioder.
Når du berører en gjenstand, vikler fingeren seg forsiktig rundtden smelter sammen med objektets konturer. Kameraet og spesielle algoritmer analyserer endringen i silikon- og akrylplater. Basert på analysen bestemmer roboten den generelle formen til objektet, overflateuregelmessigheter, orienteringen til objektet i rommet, og kraften som det er nødvendig å komprimere objektet med.
Forskerne testet deresfange ved å få bare en av de to fingrene til å berøre. Enheten de laget manipulerte med suksess forskjellige gjenstander, for eksempel en miniskrutrekker, et plastjordbær, en malingtube og et glass vin. På samme tid, når den fanget jordbær, var den interne sensoren i stand til å oppdage kornetheten på overflaten, og når den jobbet med en krukke, kunne den lese det graverte navnet.
 Kilde: MIT Computer Science and Artificial Intelligence Laboratory
Kilde: MIT Computer Science and Artificial Intelligence Laboratory
Som forfatterne av verket bemerker, glassobjekterrepresenterer en utfordring for datasynssensorer på grunn av lysbrytning. Taktile sensorer lar deg omgå denne begrensningen. Da grepet løftet glasset, kjente han stilkens orientering i rommet og kunne forsikre seg om at glasset pekte opp før han senket det ned til bordet.
Ingeniører bemerker at å skape et hulrom innifingeren litt forstyrret stabiliteten til grepet. Forskere planlegger å fullføre utformingen av enheten deres for å rette opp denne mangelen. I tillegg planlegger de å utvikle et trefingergrep som for eksempel kan plukke opp fruktbiter og vurdere modenheten deres.
Les mer:
MIT lager en stasjonær varmemotor som utkonkurrerer turbiner
Etter ti års arbeid stilte forskere spørsmålstegn ved standardmodellen for fysikk
Se hvordan soloppgangen ser ut på Mars