Hva er myke roboter?
Myk robotikk er et spesielt felt av robotikk som omhandler
Myk robotikk avhenger i stor grad avhvordan levende organismer beveger seg og tilpasser seg miljøet. I motsetning til roboter bygget av stive materialer, gir myke roboter økt fleksibilitet og tilpasningsevne til å utføre oppgaver, samt økt sikkerhet når du arbeider med mennesker. Disse egenskapene gjør at den kan brukes i medisin og industri.
Myk robotikk designer hovedsakeligroboter laget utelukkende av myke materialer. Som et resultat ser de resulterende robotene ut som virvelløse dyr som ormer eller blekkspruter. Å simulere bevegelsen til slike roboter er en vanskelig oppgave. Faktum er at for slike prosesser er det nødvendig å bruke metodene for kontinuummekanikk. Dette er grunnen til at myke roboter noen ganger kalles kontinuumroboter.
Kontinuummekanikk er en gren av mekanikk, kontinuumfysikk og kondensert materiefysikk viet til bevegelse av gassformige, flytende og deformerbare faste stoffer, samt kraftinteraksjoner i slike legemer.
Hybrider av myke og harde roboter
For å studere biologiske fenomener lager forskere myke roboter i bildet av levende organismer og utfører eksperimenter som er vanskelige å utføre på ekte organismer.
Imidlertid er det stive roboter som også er i stand til kontinuerlig deformasjon, for eksempel slangroboten.
Myke konstruksjoner kan brukes som en del avstørre stiv robot. Robote myke effektorer for å gripe og manipulere gjenstander gir en fordel. Poenget er at de ikke ødelegger skjøre gjenstander.
Det er også mulig å lage hybrid soft-hardroboter som har en innvendig stiv ramme og eksterne myke elementer. Myke elementer kan ha mange funksjoner: både virkningsmekanismer som ligner dyremuskler, og dempende materiale for å sikre sikkerhet i tilfelle kollisjon med mennesker.
 En robot på hjul med myke ben og evnen til å bevege seg på bakken.
En robot på hjul med myke ben og evnen til å bevege seg på bakken.
Foto: Ali Sadeghi, Alessio Mondini, Emanuela Del Dottore, Anand Kumar Mishra og Barbara Mazzolai
Myke roboter kan bøyes i hvilken som helst formform. De er laget av veldig mykt materiale, inkludert nanomaterialer. Dette gjør dem mer som menneskelige kroppsdeler, for eksempel muskler. Faktisk kan man si at disse robotene nesten kommer til live ved hjelp av nanomaterialer.
Til tross for mye forskning innen myke roboter, er ingeniører fortsatt helt i begynnelsen av reisen. Eksperter spår imidlertid at innen 2024 vil deres marked nå 2,16 milliarder dollar.
Hvordan er myke roboter forskjellige fra vanlige roboter?
Metallroboter er mye mer begrenset. De ble bygget med tanke på hastighet og presisjon, noe som gjorde dem ideelle for ting som montering av linjearbeid. Men de er ikke så universelle.
Myke roboter er forskjellige fra industrielle ellersamarbeidsroboter ved at konstruksjonen er laget av myke, smidige materialer. Deres design er veldig forskjellig fra alle andre roboter, og lignende myke roboter utfører veldig forskjellige funksjoner.
De fleste myke roboter er fortsatt innei de tidlige stadiene av utviklingen, og den aller første myke roboten ble utviklet i 2011 av Harvard-professor George Whitesides. Siden da har antall og typer myke roboter økt dramatisk. Selv om de kan være flere år unna deres faktiske kommersielle levedyktighet, representerer de fortsatt en spennende teknologi med stort potensial.
Myke roboter - en spennende innovasjon i verdenrobotikk. Ovennevnte fem typer myke roboter kan ha det største kommersielle potensialet til alle typer myke roboter som for tiden er under utvikling.
I motsetning til industrielle eller samarbeidende roboter, serverer myke roboter et bredt utvalg av applikasjoner.
Hvordan brukes myke roboter?
Appellen til myke roboter ligger i deres fleksibilitet og allsidighet.
6 lovende typer myke roboter
Det er mange forskjellige typer myke roboter, men det er 6 forskjellige applikasjoner som lover det største kommersielle potensialet.
- Robotmuskler: flere typer er under utviklingmyke roboter som vil fungere som robotmuskler. En av de mest lovende prototypene henter inspirasjon fra origami. Den foldede strukturen kan løfte 1000 ganger sin egen vekt og skalerer fra noen få millimeter til en meter i lengde.I tillegg jobber forskere nå med å lage roboter i nanoskala fra DNA.
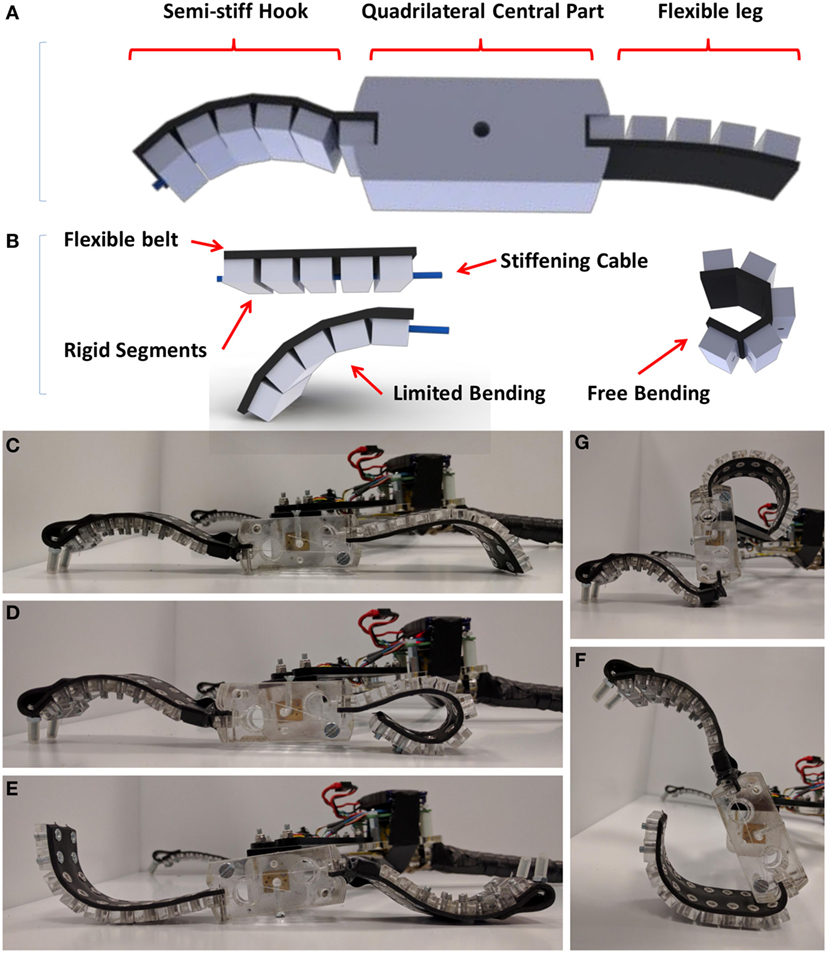
- Klatreroboter:denne typen roboter har mange potensialerapplikasjoner som spenner fra bygningskontroll og vedlikehold til søk- og redningsaksjoner. En versjon av de myke klatrerobotene har en buet design som ligner på en larve. Dette gjør at han kan krype opp og ned strukturer av forskjellige størrelser.
- Spiselige roboter. Det første prosjektet til slike roboter laget av skolelaget i Philadelphia for den årlige Soft Robotics-konkurransen. Disse biologisk nedbrytbare robotene kan trygt levere medisiner til forskjellige deler av kroppen.
- Bærbare roboter.Disse biomimetiske enhetene kan hjelpeen pasient som gjennomgår fysisk rehabilitering. Den myke roboten etterligner kroppens naturlige bevegelse uansett hvor den er, og hjelper pasienten med å få normal motorfunksjon.
- Proteseroboter.Myke roboter kan brukes til å lageoverlegne proteser for personer som mangler lemmer eller kroppsdeler. Ofte brukes myk robotteknologi i enden av en håndprotese for å gripe gjenstander mer delikat og presist.
- Astronautroboter. NASA-forskere foreslår at de en dag vil fly på overflaten av Mars. Andre designer allerede roboter som vil fungere i de delene av menneskekroppen som er vanskeligst å nå.
Selv om myke roboter også kan brukes iindustrielle miljøer - spesielt som samarbeidsroboter (også kjent som "cobots") som jobber med mennesker, er de neppe begrenset til det.
Verdens første myke autonome robot
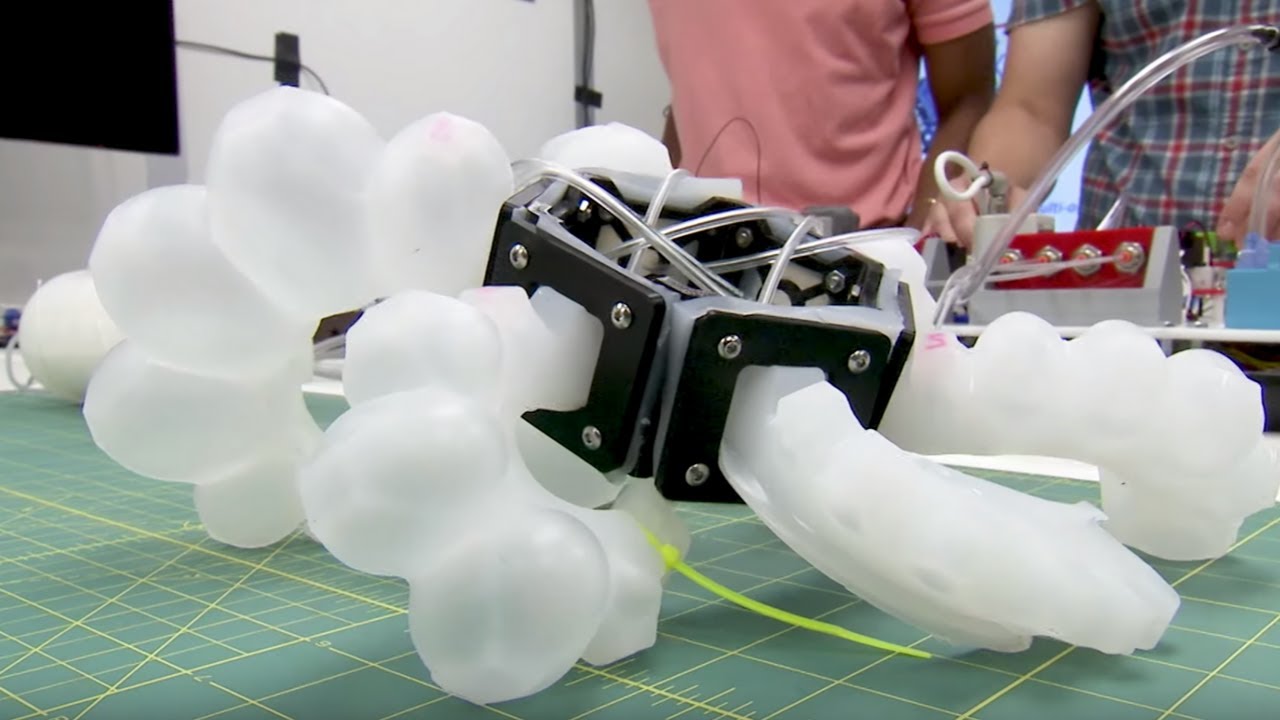
I 2016 brukte forskere fra Harvardflytende silikongummi for utviklingen av Octobot, verdens første myke autonome robot. Inspirert av blekkspruter kan disse myke robotene spinne og overvinne hindringer som kanskje ikke er mulige for skarpe, stive metallroboter som de som er avbildet i «The Terminator» eller «Star Wars».
Overraskende nok er Octobot billigere å produsere,enn en latte, og det koster bare 5 øre å fylle drivstoff på. Man kan forestille seg hundrevis av billige myke roboter som blir sendt for å undersøke åstedet, overvinne hindringer og flaskehalser for å hjelpe til med redningsaksjonen.
“Hovedmålet med myk robotikk er ikke å skapeultra-presise maskiner, fordi vi allerede har dem, '' sa biomedisinsk ingeniør Jada Gerboni i sin TED-tale i 2018. "Og å gjøre roboter i stand til å tåle uventede situasjoner i den virkelige verden."
Myke roboter innen medisin
Myke roboter kan brukes somkirurgiske og medisinske instrumenter (spesielt endoskoper). Fordelen deres er at de beveger seg lettere gjennom kroppsstrukturer enn tradisjonelle instrumenter kan. Dette gir legene et tydeligere bilde av det området av pasienten som de vil undersøke.
Fullt myke robotklær som kan hjelpe folk med å bevege seg, er et skritt nærmere virkeligheten med utviklingen av et nytt fleksibelt og lett kraftsystem for myk robotikk.
Oppdagelse gjort av et team fra BristolUniversitetet, kan bane vei for bærbare hjelpemidler for personer med funksjonshemminger og de som lider av aldersrelatert muskeldegenerasjon. Studien ble publisert i dag iScience Robotics.
 Ny tynn og lett pumpe med kredittkortstørrelse. Kreditt: Tim Helps, University of Bristol.
Ny tynn og lett pumpe med kredittkortstørrelse. Kreditt: Tim Helps, University of Bristol.
Myke roboter er laget av smidige materialer,som kan strekke og vri. Disse materialene kan brukes til å lage kunstige muskler som trekker seg sammen når luft pumpes inn i dem. Mykheten til disse musklene tillater bruk av støttende klær. Men til nå har disse pneumatiske kunstige musklene blitt drevet av konvensjonelle elektromagnetiske (motordrevne) pumper, som er store, støyende, komplekse og dyre.
Forskere ved Bristol SoftLabog Bristol Robotics Laboratory, ledet av Robotics Professor Jonathan Rossiter, har med suksess demonstrert en ny elektro-pneumatisk pumpe som er myk, fleksibel, billig og enkel å produsere.
I artikkelen beskriver teamet hvordan den nye mykeEn kredittkortstørrelse kan drive kunstige muskler med luftblære og pumpevæsker. Teamet skisserer også sine neste skritt for å gjøre kraftige klær til virkelighet.
Likeledes karbonbaserte titanpolymererkan brukes i kombinasjon med syntetiske polymerer for å skape ultratynne kunstige muskler. Denne teknologien har blitt presentert i kunstgjengivelser av dansende sommerfugler, flagrende blader og blomstrende blomster ved Korea Advanced Institute of Science and Technology.
Hvordan fungerer myke roboter?
Myke roboter spesielt designet foretterligninger av livet, må ofte utsettes for syklisk stress når du beveger deg eller utfører andre oppgaver. For eksempel, i tilfelle av lamprey eller blekksprutlignende robot beskrevet ovenfor, vil det kreve elektrolyse av vann og antenning av gass for å bevege seg, noe som resulterer i rask ekspansjon for å drive roboten fremover. Denne repeterende og eksplosive utvidelsen og sammentrekningen vil skape en intens syklisk belastning på det valgte polymermaterialet. En robot under vann i Europa ville være nesten umulig å reparere eller erstatte, så det må tas hensyn til å velge et materiale og design som minimerer forekomsten og forplantningen av utmattelsessprekker. Spesielt bør et materiale velges med en utholdenhetsgrense eller en stressamplitudefrekvens over hvilken utmattelseskarakteristikken til polymeren ikke lenger er avhengig av frekvens.
Siden myke roboter er laget av mykematerialer, må temperatureffekter tas i betraktning. Flyttspenningen til materialet har en tendens til å avta med temperaturen, og i polymere materialer er denne effekten enda mer uttalt. Ved rom og høyere temperaturer kan lange kjeder i mange polymerer strekke seg og gli langs hverandre, og forhindre lokal spenningskonsentrasjon i ett område og gjøre materialet plast. Men de fleste polymerer gjennomgår en duktil til sprø overgangstemperatur under hvilken det ikke er nok termisk energi til at lange kjeder kan reagere på denne duktile måten, og ødeleggelse er mye mer sannsynlig. Tendensen til at polymere materialer blir sprø ved lavere temperaturer antas å være årsaken til Challenger shuttle-katastrofen og bør tas veldig seriøst, spesielt for de myke robotene som vil bli introdusert for medisin. Overgangstemperaturen duktil til sprø trenger ikke å være det som kan betraktes som "kald" og er faktisk et kjennetegn på selve materialet, avhengig av dets krystallinitet, seighet, sidegruppestørrelse (når det gjelder polymerer) og andre faktorer.
Ulemper ved teknologi
Myke roboter er ikke uten sine ulemper.Spesifikt oppdaget forskerne at væskeaktuatorer - enhetene som faktisk animerer roboter - er trege til å slå på på grunn av den store mengden væske som kreves for bevegelse, eller fordi strømmen deres bremses av forskjellige strukturer i enheten (som rør og ventiler) ).
Imidlertid utvikler Harvard-forskere segløsning. De bemerker at bøying av slike leker frigjør mye energi, de designer aktuatorer med to uttrekkbare deksler, den ene inne i den andre. Når ytterhetten er oppblåst, øker trykket på innerhetten. Når den bøyer seg, frigjør energien enheten i bevegelse.
Myke roboter har potensialestrekker seg til Mars og tilbake, og de vil uten tvil bli en stor del av samfunnet de neste årene. Deres evner er bare begrenset av menneskets fantasi.
Myke roboter og mennesker
Soft-body-roboter gir muligheten forsosiale og taktile samspill mellom mennesker og roboter, som krever nøye vurdering av muligheten for upassende følelsesmessige tilknytninger og brukernes personlige og sosialt destruktive oppførsel. Etiske spørsmål knyttet til interaksjon mellom menneske og robot og hvordan de skal bidra til utforming av myk robotikk i sammenheng med sosial interaksjon er diskutert i en artikkel for tidsskriftet Soft Robotics.
Thomas Arnold og Matthias Schoitz, Tufts University,Medford, Massachusetts, var medforfatter av en artikkel med tittelen "The Tactile Ethics of Soft Robotics: Intelligent Design for Human-Robot Interaction." De utforsker et bredt spekter av emner, inkludert myke roboters evne til å berøre og samhandle med omgivelsene, potensielle risikoer ved å danne enveis menneskelige følelsesmessige forbindelser med roboter, og hva sosiale roboter skal være designet for. For å illustrere noen av de etiske problemene knyttet til myk robotikk og den potensielle risikoen for samfunnet, diskuterer forfatterne eksemplet på sexroboter.
Arnold og Schoitz foreslår tre vanligeprinsippet om å utvikle myk robotikk i sammenheng med en sosial person og en robot. De oppfordrer det myke roboticsamfunnet til å ta opp disse etiske problemene som en måte å forbedre kvaliteten og effektiviteten av interaksjon mellom menneske og robot. “Myk robotteknologi vil snart gi oss maskiner som direkte samhandler med mennesker; det er viktig at vi begynner å tenke på hvilken innvirkning de kan ha på sosiale situasjoner. Denne artikkelen skisserer noen av hovedspørsmålene og gir utmerket veiledning for seriøs diskusjon av forholdet mellom menneske og robot, avslutter Barry A. Trimmer, Ph.D., som leder laboratoriet for nevromekanikk og biomimetiske enheter ved Tufts University i Medford, Massachusetts. .
Les også
Det første nøyaktige kartet over verden ble opprettet. Hva er galt med alle andre?
Se på Hubble-bilder av planetariske tåker.
Fysikere har laget en analog av et svart hull og bekreftet Hawkings teori. Hvor det fører?