Den nye modellen kombinerer robotikk, væskedynamikk og biomekanikk, så den nye fiskelignende roboten
Nedsenkbare fartøyer er vanligvis designet for en enkelt marsjfart, og de kan ofte ikke gå fortere eller saktere. Men den nye roboten kan brukes selv i flerhastighetsoppdrag.
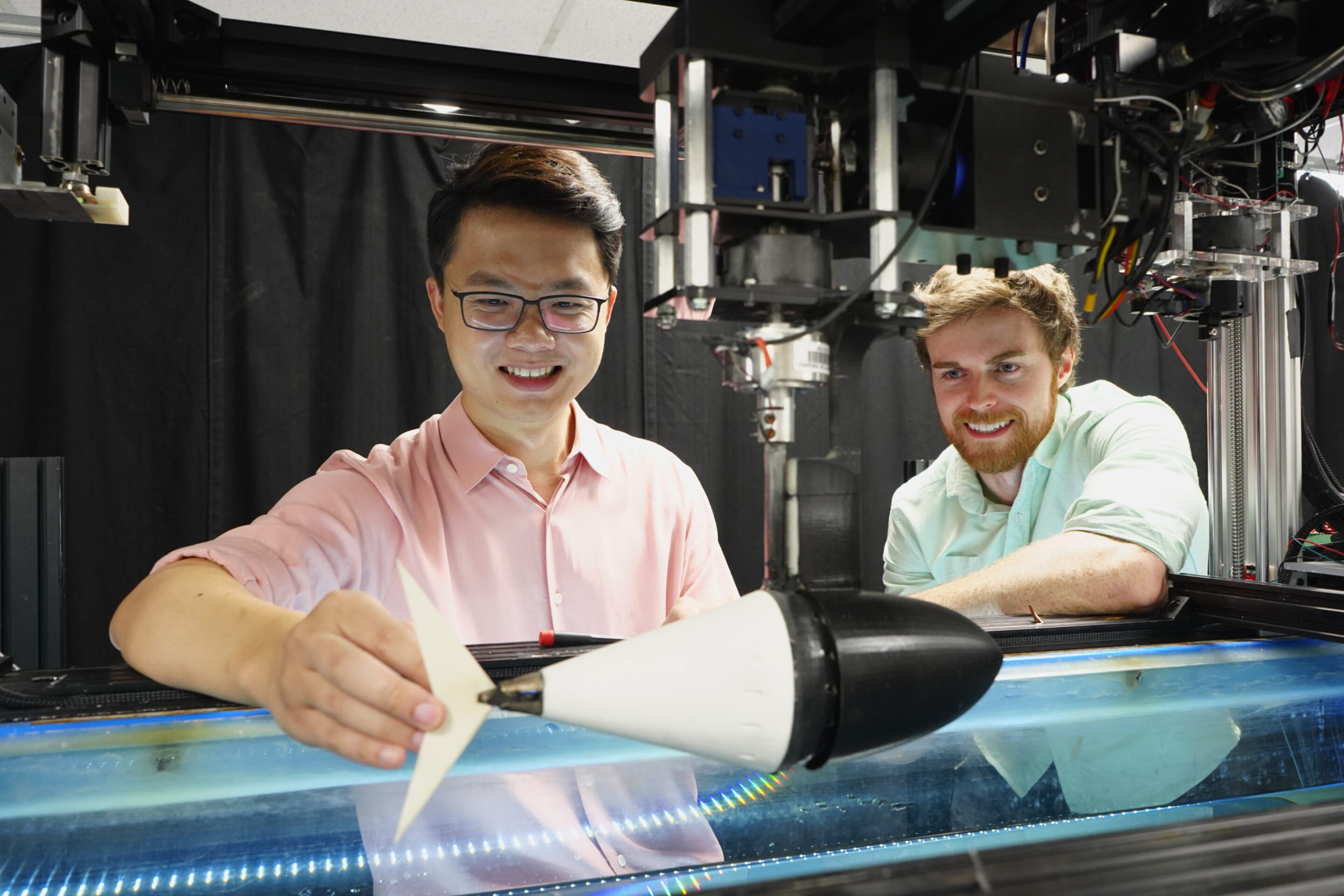
Dan Quinn, førsteamanuensis, School of Engineering and Applied SciencesVitenskaper fra University of Virginia og hans kolleger fant ut hvordan man konstruerer undervannsfarkoster med variabel hastighet. Tanken var å lage en fiskehale med justerbar stivhet: avhengig av nivået kan du oppnå forskjellige hastigheter.
Problemet er at det ikke er noen kjent måtemåle stivheten til halen til en svømmende fisk, så det er vanskelig å forstå hvilke prinsipper denne indikatoren endrer i det naturlige miljøet. Quinn og Zhong løste dette problemet ved å kombinere væskedynamikk og biomekanikk for å produsere en modell for hvordan og hvorfor halestivhet bør justeres. Som et resultat avledet de formelen: stivheten blir høyere med økende svømmehastighet i kvadrat.
For å teste teorien bygde de en fiskelignende robot med en programmerbar kunstig sene for å justere stivheten på halen mens den svømmer.
Som et resultat var roboten i stand til å svømme over et bredere hastighetsområde og kaste bort mindre energi enn roboter med fast stivhet.
Les mer:
Se de raskeste hypersoniske flyene
Bremsingen av jordens rotasjon forårsaket frigjøring av oksygen på planeten
Hva skjer med kryptovaluta: Fra stigning og fall til statsgjenkjenning