Hvem er roboter?
For noen år siden dukket det opp en kul ting på Reddit - forskere beskrev kompleks
Robotikk er en synergistisk bruktaktivitetsfelt. Den består av programmering, mekatronikk og kybernetikk. Mekatronikk er noe som samhandler med den virkelige verden. Og kybernetikk er en multi-link vitenskap, som først og fremst inkluderer administrasjon av opprettede programmer.
Hva er en robot?For 15 år siden ville mange ha sagt at dette er en robotarm som jobber på en fabrikk og som sveiser eller maler. Et annet populært svar er android-roboten fra filmverdenen. Men er en bevegelig vogn eller et ubemannet kjøretøy en robot? Ja, dette er også et av områdene innen robotikk. Fly er også roboter, noen av de siste utviklingene inkluderer intelligente teknologier og er faktisk autonome roboter.
 Mobilvognen er også en robot
Mobilvognen er også en robot
Det er også et slikt område innen robotikk som feltrobotikk - "mobil robotikk". Dette inkluderer alle roboter som beveger seg i et felt, en bygning eller under vann. Den mest interessante applikasjonen, etter min mening, er landbruk.
Flyets historie
Historien om fly begynte i fortidenårhundre. Før det var det bare ballonger uten motor som fløy, og det var vanskelig å kalle dem roboter. På begynnelsen av forrige århundre fungerte to typer fly - luftskip og fly. Den første kontrollerte flyturen ble gjort av Wright-brødrene. Dessuten dukket den første autopiloten opp ganske raskt, nesten 10 år etter det bidro den til å stabilisere flyturen.
Den nåværende retningen for robotikk er relatert tilutvikling og tilgjengelighet av nye åpne autopiloter som PixHawk (PixHawk er åpen maskinvare for kontrollere, droner og andre UAV-er. Den brukes til akademiske, amatør- og profesjonelle formål). Et eksempel på ankomsten av droner i livet til hver person er levering av pizza fra Dodo Pizza-selskapet sammen med Copt Express - dette skjedde i 2014.
 Flyets historie
Flyets historie
Hvordan dronen kontrolleres
Moderne fly bruker enav de tre prinsippene for å skape løft - aerostatisk, jet eller aerodynamisk. Det aerodynamiske prinsippet om flyging og opprettelse av løft (kaste ned en del av luften) kan implementeres enten på grunn av bevegelsen til hele apparatet, utstyrt med en fast bæreflate (vinge), eller på grunn av bevegelsen til individuelle lagerdeler av apparatet (hovedrotor, vifte) i forhold til luften.
 Hvordan enheter flyr
Hvordan enheter flyr
Dronen har en propell som skaper løft.Etter å ha kommet fra bakken, begynner enheten å bevege propellen raskere og reiser seg. Men kraften til handling er lik reaksjonskraften. Når propellen roterer, skapes et øyeblikk i motsatt retning - dette er utformingen av helikoptre og coptre. Hvis helikopteret har én propell, vil det ikke være stabilt. Derfor bruker enheten enten et to-rotor-skjema eller en halerotor.
Quadcopteren har en veldig enkel design -Den har vanligvis fire skruer, hvorav to roterer i den ene retningen og to i den andre retningen. Hvis brukeren trenger å bevege seg fremover, går noen propeller langsommere mens andre går raskere. Og hvis brukeren ønsker å snu, så akselererer noen skruer plassert diagonalt, mens andre bremser ned.
 Hvordan et quadcopter flyr
Hvordan et quadcopter flyr
Kopterets bevegelser i hjørnene er relatert til bevegelsen langskoordinater. Hvis piloten ønsker å bevege seg fremover, må vi først vippe dronen fremover, og deretter, mens den elektriske enheten trekker fremover, stabilisere den på punktet der vi ønsker å bli.
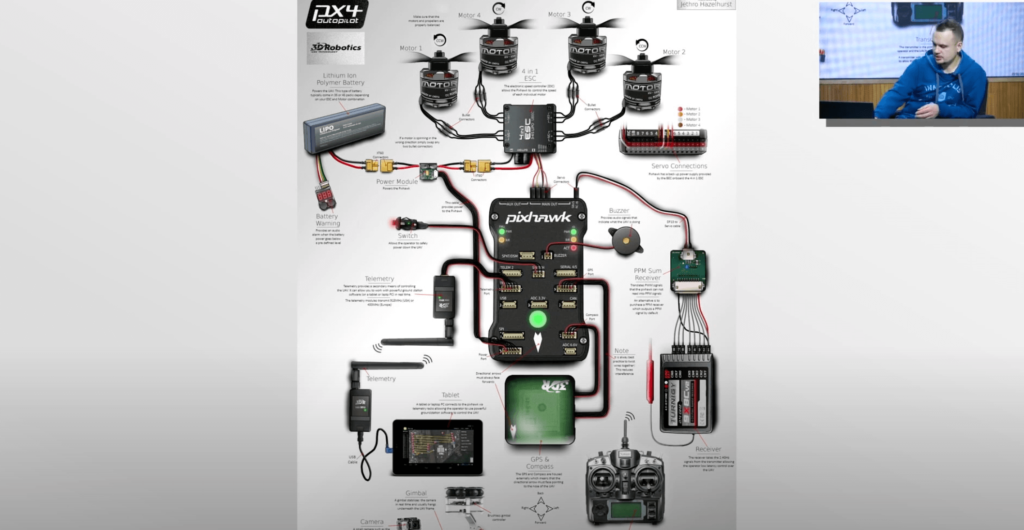
Dette er et diagram over en av de mest populære autopilotene,på grunnlag av hvilke nye enheter kan lages. Den kobles til alle motorer og sensorer. Dessuten har motorene sin egen kontrollenhet, ESC-regulatoren - Electronic SpeedController, som styrer motorens hastighet.
Av sensorer er det GPS slik at dronen kanarbeid utendørs, fly til poeng og stabiliser posisjonen. Men inne i selve autopiloten er det også en IMU - en treghetssensormodul som lar den bestemme holdningsvinkler. Det er også en kommunikasjonskanal, en bakkekontrollstasjon og et batteri.
 UAV-enhet
UAV-enhet
Som nevnt ovenfor er det et nivåmotorstyring - vi kan uten å nøle stille inn rotasjonshastigheten. Resten av nivåene fungerer etter samme prinsipp: det neste er orienteringskontroll.
Men først må vi kontrollere rotasjonshastigheten- FPV-koptere flyr på dette nivået (enheter som lar deg se bildet fra dronens kamera i sanntid fra første person (FPV - First Person View). Erfarne piloter stiller inn rotasjonshastigheten og styrer hele tiden med joysticken. Den neste trinn er når brukeren kan stabilisere vinkelen, men dronen vil fortsatt bevege seg. Neste er hastighetskontroll, og den høyeste er posisjonskontroll, manøvrer for å flytte til et punkt eller bevege seg langs en gitt bane.
De som ønsker å programmere, bygge ogkontrollere droner - bør ta hensyn til PIX4 åpen kildekode autopilot. Det er et helt fellesskap rundt luftrobotikk (ROS – robotic operating system, eller Open robotics), det finnes simulatorer for droner. Derfor kan mange eksperimenter utføres i simulatoren uten å ha selve dronen.
Droneutviklingsstadier
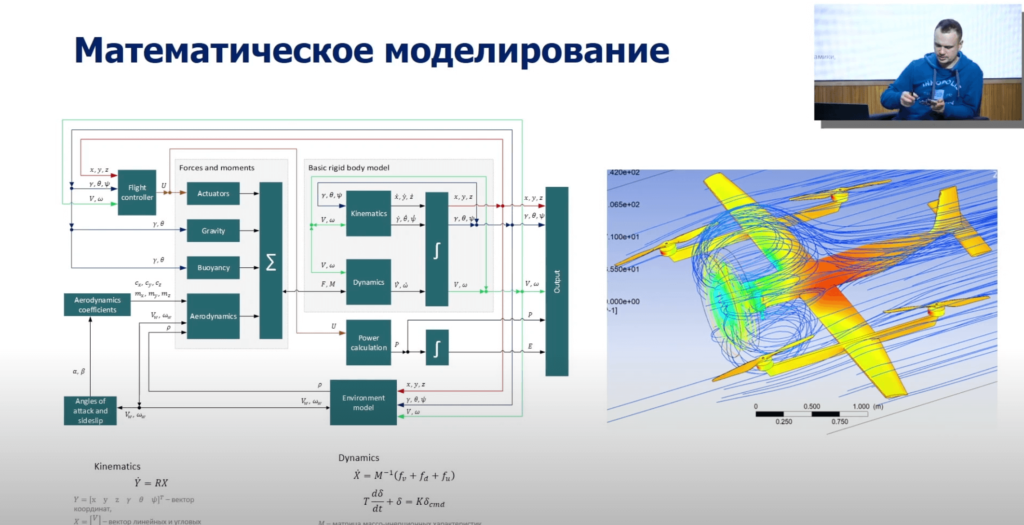
Forskere starter med en konseptuellmodellering, og så må de bygge en nøyaktig modell av apparatet. Uten å gå inn på formelen, er en coptermodell i hovedsak en stiv kroppsmodell. Dette er Newtons andre lov utvidet til systemer av partikler. Den har translasjons- og rotasjonsbevegelse, det er kinematikk og bevegelsesdynamikk, og for å beskrive modellen til en spesifikk enhet, må vi her legge til ligningen av krefter som virker på en spesifikk drone.
 Hvordan UAV-er er modellert
Hvordan UAV-er er modellert
Neste steg er å utvikle systemetledelse. Hvis vi går på den klassiske måten: først finner vi ut den nøyaktige matematiske modellen, og på grunnlag av den syntetiserer vi allerede kontrollalgoritmen eller nye formler. Alle nivåer kan inkluderes i kontrollsystemet: bevegelsesplanlegging, miljøoppfattelse, tilstandsestimering ved hjelp av sensorer. Algoritmer lar oss avgrense våre koordinater og data.
 Dronekontrollsystem
Dronekontrollsystem
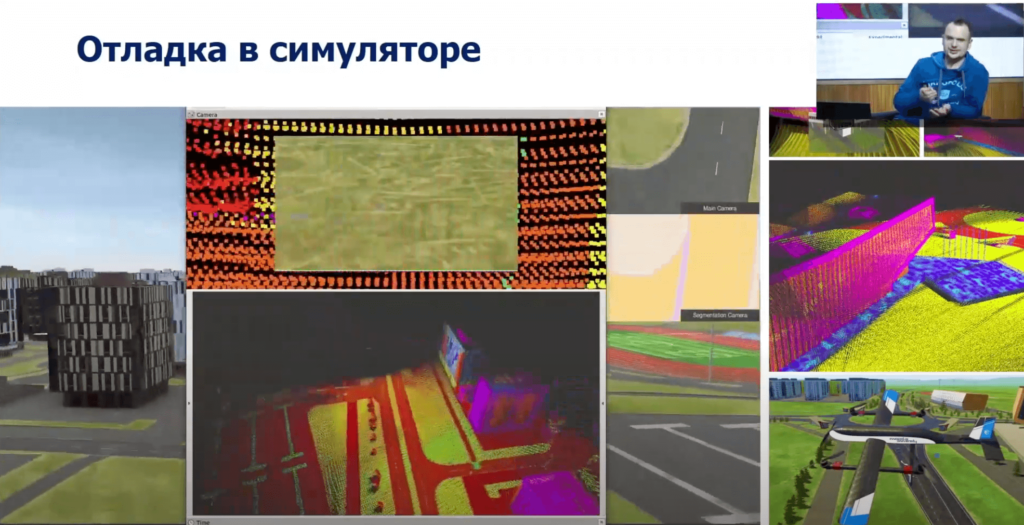
Når det er en kontrollalgoritme, kan det være umiddelbartgjelder, men det er ganske dyrt. Enheter krasjer ved den minste feil - dette må tas i betraktning og sikkerhetskopier gjøres. Simulatorer brukes til testing.
Nedenfor er en virtuell omvisning i Innopoliser et produkt fra universitetet vårt, er det tilgjengelig for nedlasting på GitHub. Dette er ikke bare en visuell komponent, men også dataene til alle sensorene på enheten. Den har alle posisjonssensorer, den styres som en drone og kan feilsøke alle kontrollalgoritmer.
 Hvordan droner lærer i simulering
Hvordan droner lærer i simulering
Når basert på erfaring med simulatoren visesmer selvtillit - du kan gå videre til maskinvareimplementering. Komponentene er vist her: produksjon av enheten fra karbon og kompositt, opprettelse av elektronikk, plassering av motorer, deres festing.
Tester starter ikke på gaten:Først testes enhetene på et oppheng eller et spesielt stativ. De kan brukes til å feilsøke elementer av funksjonen til et ubemannet luftfartøy. For eksempel vises et vertikalt start- og landingsfly her - dette er en hybrid av et copter og et fly; i videoen kan du se hvordan det takler eksterne forstyrrelser og opprettholder en vinkel. Til høyre er et ganske sprøtt eksperiment der du fyrer opp fem motorer samtidig og ser hvordan kontrollsystemet håndterer det.
 Hvordan droner er bygget
Hvordan droner er bygget
Etter testing går de videre til flyreiser -små starter i lave hastigheter, kontrollert bevegelse med en pilot som kan ta kontroll. Den siste akkorden er en helt ubemannet flytur.
Enheten tar av vertikalt -«som et copter», så slås hovedmotoren på, dronen akselererer, bytter til flymodus og utvikler tilstrekkelig hastighet til at vingen skal fungere. Deretter slås konturpropellene av, og den flyr som et fly – landingsprosessen utføres i omvendt rekkefølge.
Hva skjer med droner
En av oppgavene som moderneforskere - omgå hindringer under flukt. Noen droner vet allerede hvordan de skal gjøre dette, men oppgaven er litt bredere - du må lære enhetene å bevege seg så raskt som mulig i et miljø med hindringer. Og det er fortsatt rom for å strebe og forbedre algoritmene.
Et annet eksempel på slik testing er en flytur tilskog. Det er en veldig interessant tilnærming – ikke bare nye algoritmer brukes her, men også sensorer – et hendelseskamera. Dette er et svært høyfrekvent kamera som overfører forskjellen mellom bilder i hver tidsenhet: dette lar deg raskt kontrollere og reagere på hindringer.
Når det gjelder planlegging av dronebevegelser,konkurranse: hvem vil gjøre det raskere. Oppgaven er å kartlegge et ukjent område, bygge dets tredimensjonale representasjon, finne objekter på det. Vi fløy på universitetet, men løste også problemet med å finne gjenstander. Resultatene våre var enda bedre enn kjente publiserte algoritmer.
Det er konkurranser i dronerløpet.De er laget på enheter med kamera, når piloten har briller og han styrer dronen for å fly gjennom porten så raskt som mulig. En ganske spektakulær begivenhet, hvor samme oppgave må utføres i automatisk modus. Dessverre har datamaskinen så langt klart å beseire en person bare i sjakk, og droneroboten har ikke klart å overta en menneskelig pilot, selv om fremgangen allerede er ganske alvorlig. En drone ved hjelp av en maskinsynsalgoritme kan utføre slike oppgaver, arbeidet er kun å øke hastigheten.
En annen konkurranse er Microsoft Games ofdroner, utføres det i en simulator. En av de kjente ledende konkurransene i Saudi-Arabia arrangeres i samme område. Deltakere der rekrutteres tre år i forveien.
Ubemannede enheter brukes til droneshow– Dette er spektakulære arrangementer som i dag har blitt en erstatning for fyrverkeri. Men det er ikke den eneste gruppebruken - de kan inspisere et større område.
Hvor gjelder
Slik at det ikke ser ut som utelukkende vitenskapeligutvikling, nedenfor er en demo av Skydio-dronen. Nå er dette den mest avanserte enheten når det gjelder autonomi. Dette er et eksempel på hvordan moderne teknologier – kartografi, unngåelse av hindringer, trafikkplanlegging brukes sammen i et produkt som allerede er tilgjengelig for brukeren.
En annen retning er nye designfly. En av dem er sammenleggbare droner. En slik enhet kan fly inn i trange rom for inspeksjon etter en ulykke. Et annet eksempel er en drone som kan utfolde seg. For eksempel kan han fly ut av et smalt pneumatisk rør og deretter fly som vanlig.
Vi har også et prosjekt på dette området - dette ermyk Tensodrone. Dette er den første softshell-dronen som flyr. Gleden er at du kan slippe den og den forblir intakt. I tillegg kan du endre lengden på bjelkene, spenningen på kablene.
To eksempler som vil komme til live isnart. Først levering ved hjelp av droner. Nå er det en veldig interessant implementering der vi kombinerer en pakketerminal og en dronelandingsstasjon - i dette tilfellet trenger vi ikke bekymre oss for når dronen kommer, hvor den vil lande, slik at vi kan komme til den på tid og hente lasten før den blir stjålet. Det andre eksemplet er en flygende taxi. Dette er det mest spennende utviklingsområdet, og det finnes allerede fungerende prototyper. Men dette vil skje først i det neste tiåret.
Hvilken utvikling innen flygende drosjer har dukket opp de siste 6 årene:
– Selskapet «Hover» presenterte et apparat medstøysvak elektrisk motor og kompakte dimensjoner - som en bil. Den tar av til en høyde på 150 m og lander på en standard parkeringsplass. Dronen er designet for to passasjerer, maksimal nyttelast er 300 kg, og hastigheten er 200 km/t.
— I 2016 har det russiske selskapet Hoversurfviste en hoverbike som du kan bære med deg og ta av når som helst fra en vanlig byparkeringsplass. Den når hastigheter på opptil 100 km/t, og løftehøyden er tvangsbegrenset til 5 meter av sikkerhetsmessige årsaker.
— I 2018 utviklet av Airbus-passasjerAlpha One VTOL-flyet klatret til en høyde på 5 meter og holdt seg i luften i 53 sekunder. Brukeren vil kunne ringe UAV gjennom applikasjonen og komme seg fra ett punkt til et annet både i byen og utenfor.
— I 2020 laget CityAirbus lufttaxiførste gratis fly. Testingen fant sted i forstedene til Paris, byen Île-de-France. CityAirbus-flyet er i stand til å bevege seg i hastigheter opp til 120 km/t i en avstand på opptil 30 km. Vekten på den flygende taxien er mer enn 2,2 tonn, CityAirbus er utstyrt med tre passasjerseter og ett førersete.
– I 2022 introduserte den kinesiske startupen Pantuo Aviation T1, en flygende taxidemonstrator med luftkanal. Den vil fly i hastigheter over 300 km/t og ha en rekkevidde på 250 km.
Les mer:
Romsonden fløy 200 km fra Merkur. Se hva han så
Forskere avdekker hvordan vitaminer påvirker forekomsten av kreft
Kinesisk tankeleserhjelm slår alarm når en person ser pornoinnhold