Inżynierowie z Uniwersytetu w Cambridge opracowali miękkie ramię robota wydrukowane na
Naukowcy wykorzystali drukAntropomorficzna dłoń z wszczepionymi czujnikami dotykowymi w drukarce 3D, dzięki którym ręka może „czuć” to, czego dotyka. Ręka była zdolna tylko do ruchu biernego opartego na nadgarstku. „Dużą zaletą tego projektu jest zakres ruchu, który możemy uzyskać bez użycia jakichkolwiek siłowników” – mówią autorzy.
Szkolenie „pasywnego” ramienia robota. Wideo: Uniwersytet w Cambridge
Naukowcy przeprowadzili ponad 1200 testów z ramieniem robota,obserwując jej zdolność chwytania małych przedmiotów bez ich upuszczania. Początkowo robot był szkolony przy użyciu małych plastikowych kulek wydrukowanych w 3D i chwytał je za pomocą z góry określonych działań zaczerpniętych z demonstracji na ludziach.
Robot zastosował metodę prób i błędówdowiedzieć się, które przechwytywanie zakończy się sukcesem. Po zakończeniu ćwiczeń z piłką próbował chwycić różne przedmioty, w tym brzoskwinię, mysz komputerową i rolkę folii bąbelkowej. W tych testach ręka była w stanie z powodzeniem chwycić 11 z 14 przedmiotów.
Fotografowanie obiektów o różnych rozmiarach, kształtach i teksturach- zadanie proste dla człowieka, ale trudne dla robota. Większość dzisiejszych zaawansowanych robotów nie jest w stanie wykonywać zadań manipulacyjnych, z którymi małe dzieci mogą sobie łatwo poradzić. Na przykład ludzie instynktownie wiedzą, ile siły należy użyć, aby podnieść jajko, ale dla robota jest to problem: zbyt mała siła spowoduje upadek przedmiotu, zbyt duża spowoduje rozbicie jajka.
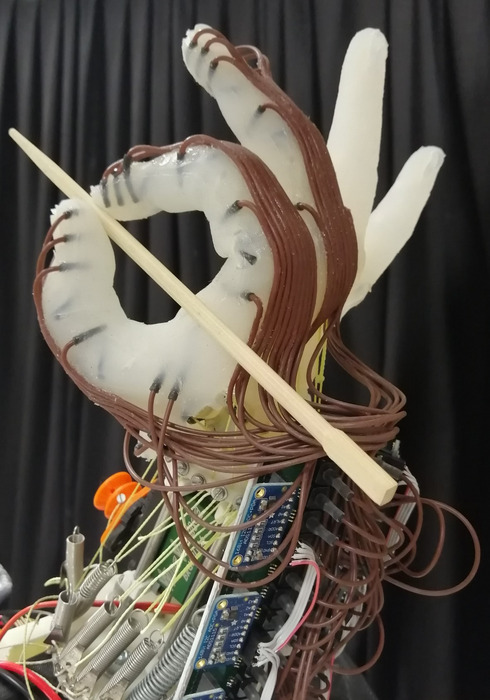 Prototyp chwytaka robota. Zdjęcie: Uniwersytet Cambridge
Prototyp chwytaka robota. Zdjęcie: Uniwersytet Cambridge
Zaawansowana technologia ze zmotoryzowanymi palcamiwymaga znacznej ilości energii i dużej liczby skomplikowanych i kosztownych siłowników dla każdego złącza. Zaproponowany przez inżynierów pasywny uchwyt sprawia, że robot jest znacznie łatwiejszy w sterowaniu i znacznie bardziej energooszczędny. Naukowcy są przekonani, że ich adaptowalny projekt może zostać wykorzystany do opracowania niedrogich robotów zdolnych do bardziej naturalnych ruchów.
Czytaj więcej:
Spójrz na mapę Marsa w najwyższej rozdzielczości: 110 000 klatek i 5,7 biliona pikseli
„Morze” kwarków wewnątrz jednego protonu: z czego składa się cząstka elementarna
Nowy obraz Hubble'a zaintrygował naukowców
Na okładce: prototyp chwytaka robota. Zdjęcie: Uniwersytet Cambridge