Инженеры из японской исследовательской организации RIKEN Cluster for Pioneering Research сообщили о создании управляемого
Инженеры прикрепили беспроводной модуль управления ногами и литий-полимерный аккумулятор к верхней части грудной клетки шести сантиметрового таракана. Устройство удерживается благодаря специальному рюкзаку. Он был смоделирован по образцу тела модельного таракана и напечатан на 3D-принтере из эластичного полимера.
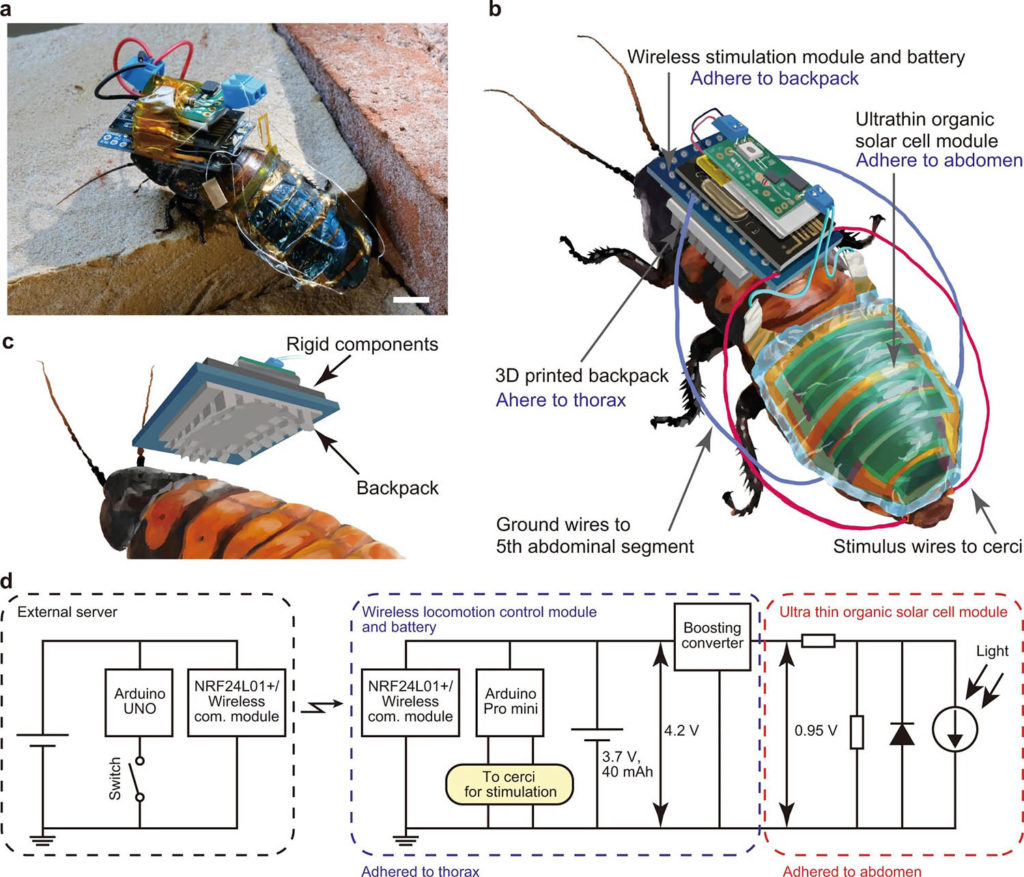 Obraz i schemat karalucha robota. Źródło: Yujiro Kakei i in., npj Flexible Electronics
Obraz i schemat karalucha robota. Źródło: Yujiro Kakei i in., npj Flexible Electronics
Проанализировав движения тараканов, ученые поняли, что брюшко постоянно меняет свою форму, а части экзоскелета перекрываются. Эти особенности делают сложным закрепление посторонних предметов на теле насекомых. В конструкции рюкзака инженеры чередовали клейкие и неклейкие участки на пленках, что позволяло им сгибаться, но при этом оставаться прикрепленными.
Zaprojektowany plecak idealnie pasujezakrzywiona powierzchnia karalucha. Dzięki temu urządzenie nie krępuje ruchów, karaluch może poruszać się z normalną prędkością, a moduł sterujący pozostaje w stabilnej pozycji przez ponad miesiąc.
Po zintegrowaniu tych komponentów wkaraluchy wraz z przewodami stymulującymi segmenty nóg impulsami elektrycznymi przetestowano nowe cyborgi. Akumulator był ładowany pseudo-światłem słonecznym przez 30 minut, a zwierzęta skręcały w lewo i prawo za pomocą bezprzewodowego pilota.
Naukowcy zauważają, że karaluchy cyborgimoże służyć do badania obszarów niebezpiecznych i trudno dostępnych. Aby to zrobić, oprócz modułu sterującego, w plecaku muszą znajdować się niezbędne czujniki, na przykład dozymetry promieniowania.
Czytaj więcej:
Roślina na Marsie produkuje tlen w tempie przeciętnego drzewa
Fizycy schłodzili atomy do rekordowych temperatur. Są miliard razy zimniejsze niż przestrzeń kosmiczna.
Mały dinozaur „zamienił się” w klejnot. Ma prawie 100 milionów lat