Autorzy nowej pracy postawili hipotezę, że modele najlepiej szkolić za pomocą predykcji
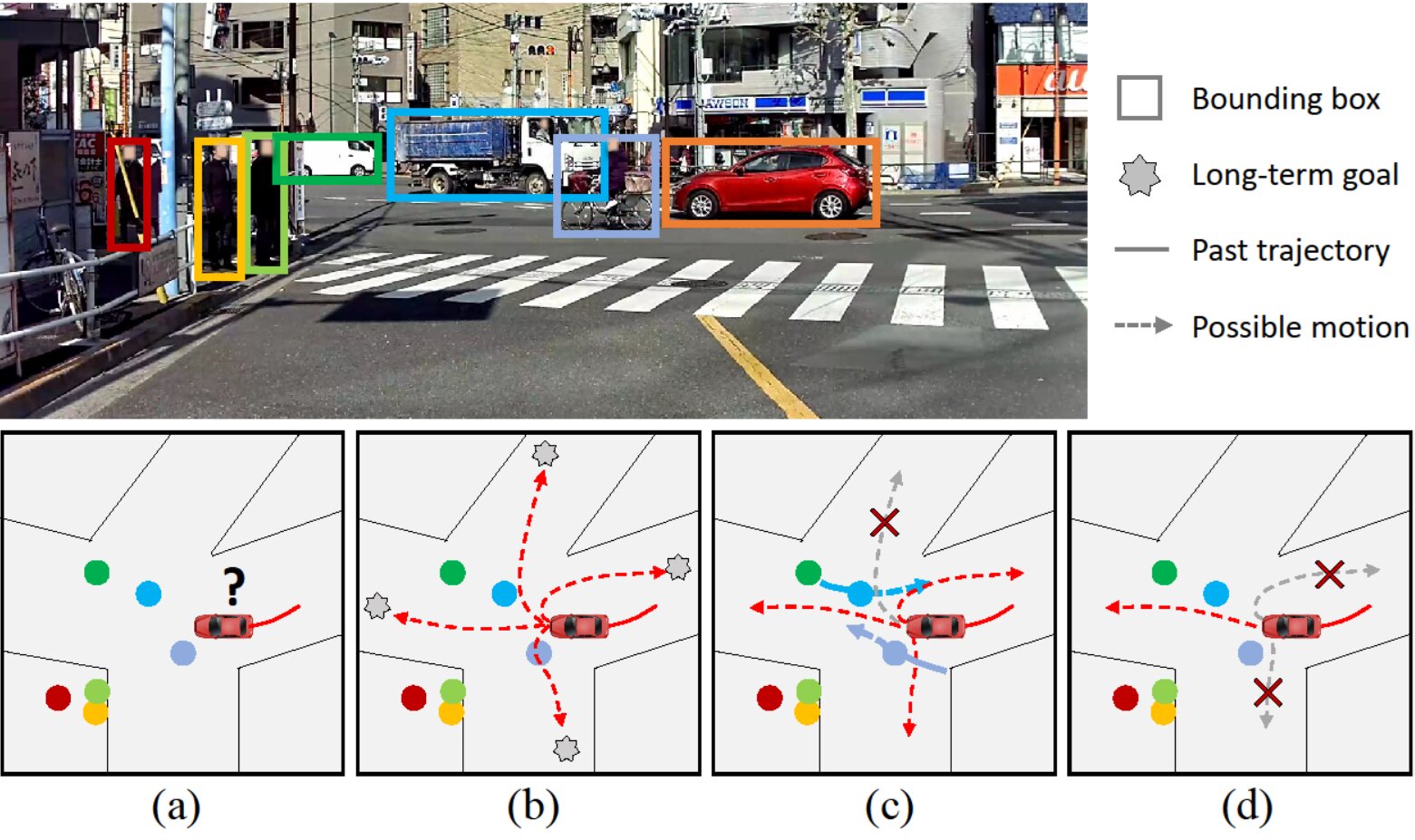
Badacze planują opracować architekturę uwzględniającą zarówno cele krótko-, jak i długoterminowe — są to główne elementy oceny intencji pieszego lub samochodu.
Na przykład na skrzyżowaniu stoi samochódchce skręcić w lewo. Ważne jest, aby wziąć pod uwagę nie tylko dynamikę transportu, ale także to, jak intencja może się zmieniać w zależności od różnych czynników: z powodu własnego pragnienia, innych użytkowników drogi czy przeszkód.
Następnie algorytm najpierw koduje przeszłe doświadczenia, na podstawie których uczono model, aby przewidywał, jakie mogą być konsekwencje długoterminowe i krótkoterminowe.
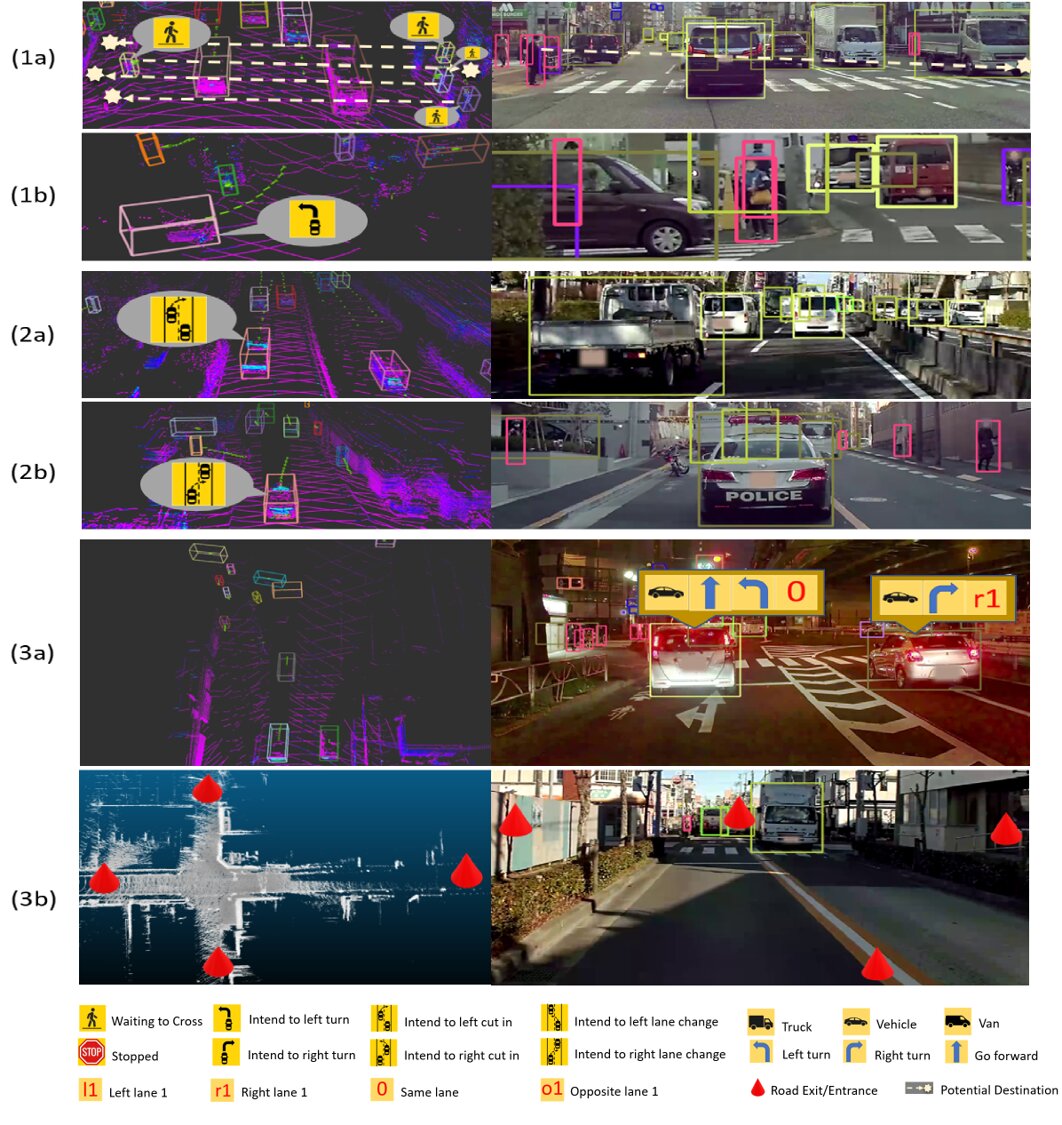
Model przypisuje do wszystkich otaczających obiektówwskazówki to „intencje”, które mogą się zmieniać po drodze, „środowisko”, takie jak znaki drogowe i drzewa, które wpływają na intencje agentów, oraz „wskazówki kontekstowe”, takie jak pogoda i warunki drogowe.
Naukowcy ocenili swój model w serii testów i odkryli, że przewyższa on inne najnowocześniejsze metody przewidywania trajektorii o 27%.
Twórcy uważają, że model może byćwykorzystywane do poprawy bezpieczeństwa i osiągów pojazdów autonomicznych. Ponadto inne grupy badawcze mogą wykorzystać zestaw danych LOKI do przygotowania własnych modeli do przewidywania ścieżek pieszych i pojazdów na drodze.
Czytać Dalej:
Nowy iOS 15: data premiery, wygląd i funkcje iPhone'a. Mówimy wszystko, co wiadomo
Ultracienki materiał został wykonany z białego grafenu. Zastąpi serwery
Zobacz ciężkiego drona bojowego, który nosi tonę broni