Wykorzystali to naukowcy z University of Illinois w Urbana-Champaign i Princeton University
Naukowcy wykorzystali maleńką spiralęsiłowniki naśladujące pracę mięśni tułowia chrząszcza. Sztuczny siłownik ciągnie maleńką wiązkę, powodując powolne wyginanie robota i magazynowanie energii sprężystej. Po uwolnieniu energia ta popycha robota w górę.
W poprzednich badaniach naukowcy to odkrylichrząszcz ma specjalny mięsień spiralny. Przechowuje energię i jest wyzwalany na przykład, gdy owad przewraca się na plecy. Pod działaniem ostrego wyprostowania tego mięśnia ciało chrząszcza wyrzuca się na dużą wysokość, kilkakrotnie większą. Ten sam mechanizm działa w przypadku robotów.
Jednym z głównych wyzwań robotyki na małą skalę jest znalezienie projektu, który jest mały, ale wystarczająco mocny, aby pokonać przeszkody lub szybko opuścić niebezpieczne miejsca.
Sameh Tawfiq, kierownik działu badań
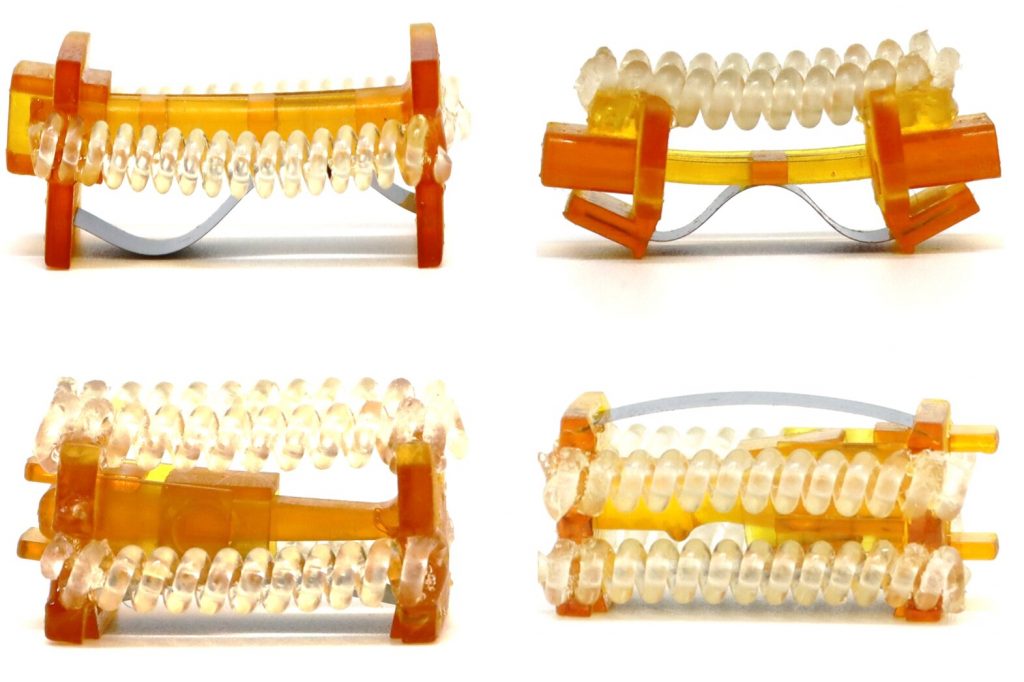 Warianty projektów skaczących robotów proponowane przez badaczy. Zdjęcie: Uniwersytet Illinois Urbana-Champaign
Warianty projektów skaczących robotów proponowane przez badaczy. Zdjęcie: Uniwersytet Illinois Urbana-Champaign
Naukowcy są przekonani, że zrobią to małe robotyaby dostać się do trudno dostępnych miejsc, aby pomóc w przeprowadzeniu konserwacji dużych maszyn, takich jak turbiny i silniki odrzutowe, lub w rolnictwie, aby sprawdzić rośliny, na przykład zrobić zdjęcia w celu zidentyfikowania problemów.
Czytaj więcej:
Gigantyczna plama słoneczna zwraca się w stronę Ziemi. Jest to widoczne gołym okiem
Zobacz, jak leci samolot bez śmigieł. Jego prędkość przekracza 900 km/h
Droga Mleczna jest nienormalnie duża jak na swoje galaktyczne włókno
Na okładce: artystyczna ilustracja pomysłu. Zdjęcie: Michael Vincent, University of Illinois Urbana-Champaign