Google przeprowadził badania i stworzył algorytmy, które przyspieszą i uproszczą ten proces
Co zrobiłem
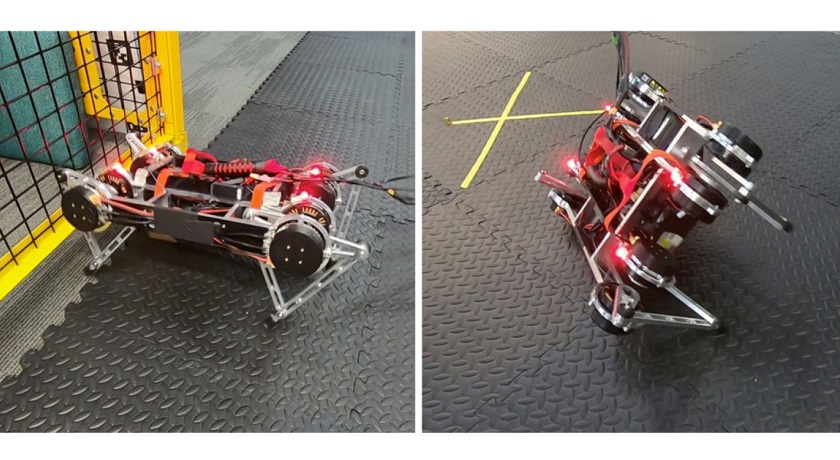
Naukowcy z Google Robotics stworzyliczworonożny robot, który w ciągu kilku godzin nauczył się samodzielnie chodzić tam i z powrotem oraz obracać się. Wcześniej algorytmy testowano na wirtualnym robocie w środowisku wirtualnym, co pomogło zapobiec uszkodzeniu prawdziwego robota. Jednak proces emulacji różnych powierzchni był zbyt pracochłonny.
</ img>
Naukowcy rozpoczęli szkolenia w świecie rzeczywistym irobot potrafił szybko dostosować się do nierównego terenu. Jednak interwencja człowieka była nadal konieczna, a badacze musieli interweniować w uczenie się człowieka. Ograniczyli więc powierzchnię i zmusili robota do nauki wielu manewrów jednocześnie. Jeśli robot po dotarciu do krawędzi swojego terytorium pójdzie do przodu, zorientuje się, że przed nim znajduje się przeszkoda i zacznie się cofać, nabywając nową umiejętność.
Dzięki temu systemowi robot mógł, metodą prób i błędów, nauczyć się samodzielnego poruszania się po różnych powierzchniach.
Badanie ma jednak ograniczenia:Technologia ta nie jest jeszcze uniwersalna i odpowiednia dla wszystkich typów robotów. Naukowcy mają jednak nadzieję dostosować nowe algorytmy do różnych robotów. Jeśli im się to uda, może to znacznie rozwinąć robotykę.