Niedawno naukowcy przeprowadzili badanie mające na celu odtworzenie ludzkiej zdolności do determinacji
W artykule podkreślono korzyści płynące z opracowania robotów, które mogą wchodzić w interakcję z otoczeniem za pomocą dotyku, a nie tylko przetwarzania obrazu i dźwięku.
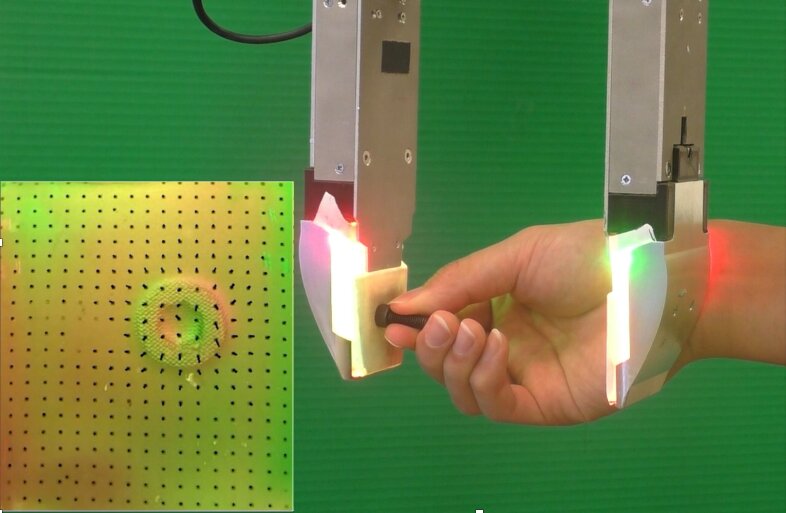
Celem naszej pracy było pokazanie tego za pomocąDzięki wysokiej rozdzielczości czujnikom dotykowym znane obiekty można dokładnie zlokalizować już po pierwszym kontakcie. Stanowi to istotny postęp w stosunku do wcześniejszych prac nad lokalizacją dotykową, ponieważ nie opieramy się na żadnych innych trybach percepcji zewnętrznej (np. wzroku) ani na wcześniej zebranych danych dotykowych powiązanych z manipulowanymi obiektami.
Maria Bauza, jedna z badaczek
Nowa technika uczy się na podstawie symulacji, a niewymaga obszernego gromadzenia danych. Początkowo badacze opracowali strukturę, która symuluje kontakt danego obiektu z czujnikiem dotykowym, pod warunkiem, że robot ma dostęp do danych o obiekcie, z którym oddziałuje (np. O jego trójwymiarowym kształcie, właściwościach itp.).
Następnie badacze wykorzystali nowoczesnemetody uczenia maszynowego na potrzeby widzenia komputerowego i uczenia się reprezentacji w celu dopasowania obserwacji dotykowych w świecie rzeczywistym zebranych przez robota z zestawem kontaktów wygenerowanych w procesie symulacji.
Zasadniczo metoda opracowana przez tę grupębadacze mogą modelować informacje kontaktowe po prostu w oparciu o trójwymiarowy kształt obiektu. W rezultacie nie są wymagane żadne wstępne dane dotykowe zebrane w wyniku dokładnego zbadania obiektu. Pozwala to na wygenerowanie szacunkowej pozycji obiektu na podstawie pierwszego dotknięcia czujników dotykowych robota.
Czytaj więcej
Ziemia osiągnie temperaturę krytyczną za 20 lat
Aborcja i nauka: co stanie się z dziećmi, które będą rodzić
Została nazwana roślina, która nie boi się zmian klimatycznych. Wyżywia miliard ludzi