 Amerykańscy inżynierowie stworzyli robota rybnego Bluebot. Nie potrafią nawet pływać.
Amerykańscy inżynierowie stworzyli robota rybnego Bluebot. Nie potrafią nawet pływać.
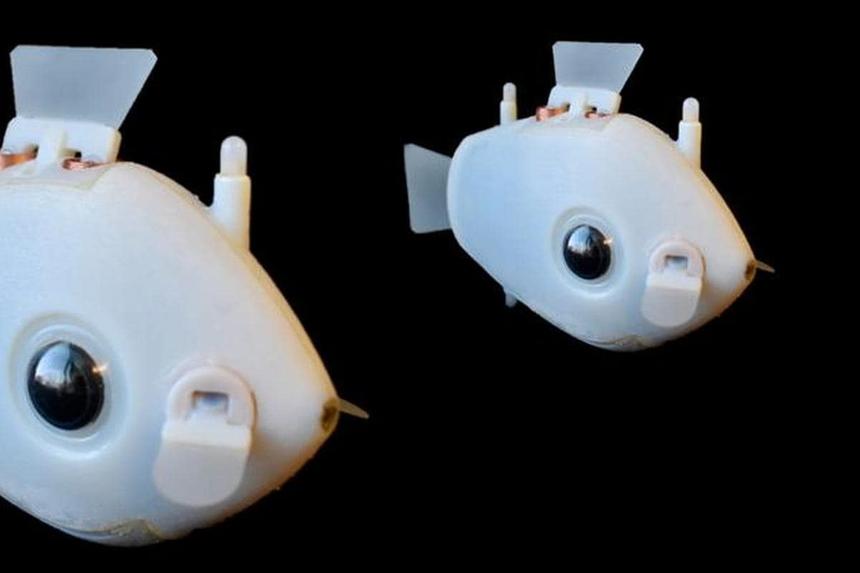
Długość ciała ryby robota
wynosi około 10 centymetrów.Pod wodą są dość zwrotne. Ponadto deweloperzy nie mogą zarządzać ławicą ryb. Wszystkie miniroboty w szkole podejmują niezależne decyzje na podstawie informacji wizualnych. Otrzymują obraz poprzez wbudowane kamery. Ponadto w korpusy robotów wbudowane są znaczniki LED, które pomagają „rybkom” identyfikować się nawzajem. Obraz z kamer przetwarzany jest na komputerze pokładowym Raspberry Pi Zero W.