Silnik samolotu to labirynt skręconych, obracających się rur, przez które transportowane są ciecze i gazy
Ich wynalazkiem jest deszcz mechanicznyrobaki z „mięśniami” wykonanymi z dielektrycznych siłowników z elastomeru i „nogami” wykonanymi z kompozytów włókna węglowego. Rozwój opisano szczegółowo w artykule opublikowanym w recenzowanym czasopiśmie Science Robotics.
Istniejące metody sprawdzania lotnictwasilniki są czasochłonne i wymagają wysoko wykwalifikowanych inżynierów. Mamy nadzieję, że roboty będą wykonywać tego rodzaju pracę, oszczędzając czas i wysiłek.
Huichang Zhao, jeden ze współautorów badania, w wywiadzie dla IE
To nie pierwszy robot przeznaczony do inspekcjirur o średnicy centymetrowej i milimetrowej. Inne projekty wykorzystują koła lub inne środki do poruszania się po zamkniętych przestrzeniach. Ale te rozwiązania nie zawsze są praktyczne, twierdzą autorzy nowej pracy. Jednym z powodów jest to, że warunki panujące w różne rurociągi mogą się znacznie różnić, nawet w przypadku tego samego silnika. Projekty te mogą również mieć trudności z wykonaniem dwóch równie ważnych zadań dla tego typu robota: poruszania się i inspekcji.
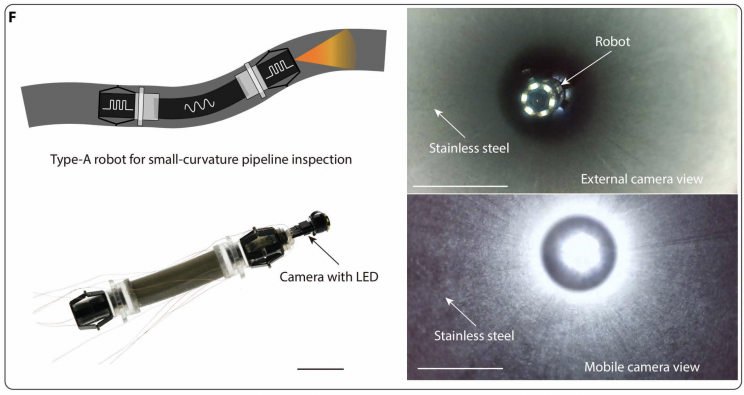 Zdjęcia robota z przednią kamerą i robota badającego otoczenie w rurze ze stali nierdzewnej.
Zdjęcia robota z przednią kamerą i robota badającego otoczenie w rurze ze stali nierdzewnej.
Źródło
Aby złagodzić te ograniczenia, inżynierowieinspirowane są robotami napędzanymi pneumatycznie, które poruszają się na całej długości sprężonym powietrzem, pełzając jak robaki. Łatwiej je uszczelnić i skurczyć do małych rozmiarów, ponieważ nie mają skomplikowanych wystających elementów, takich jak koła czy nogi. Jednak te roboty są zwykle powolne.
Nowa konstrukcja pozwala na poruszanie sięzupełnie inaczej. Zamiast sprężonego powietrza, urządzenie przypominające dżdżownicę wykorzystuje ładunki elektryczne do przemieszczania się falami w rurze.
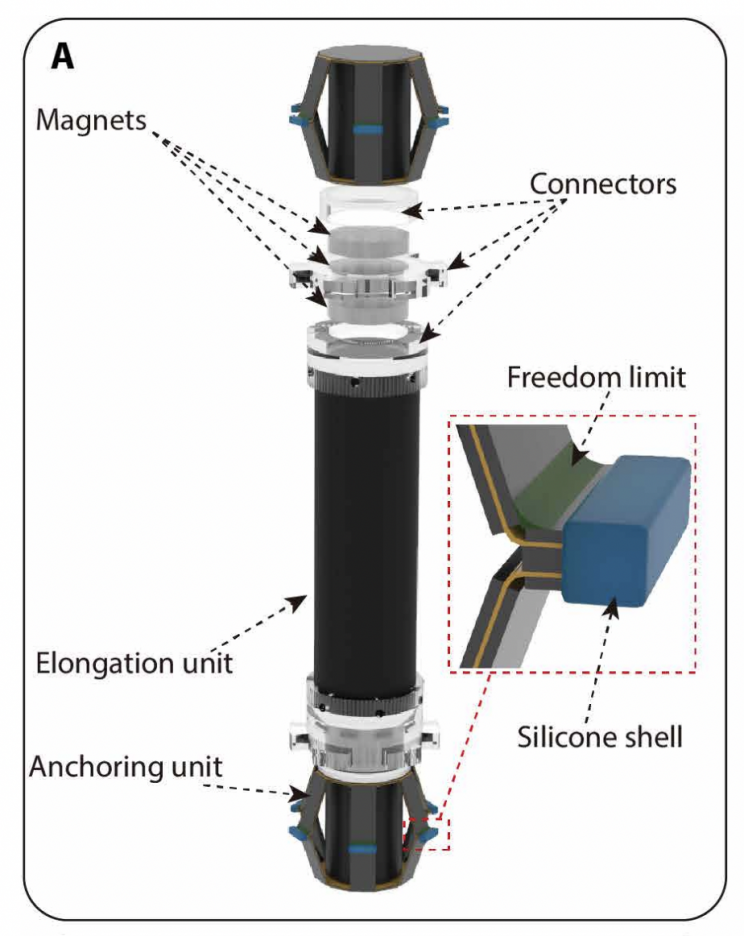 Schematyczne przedstawienie robota.
Schematyczne przedstawienie robota.
Źródło
Kluczową technologią robota są sztuczne mięśnie,znane również jako siłowniki miękkie lub siłowniki z dielektrycznego elastomeru. Są mocne i na tyle małe, że robot może szybko poruszać się po rurze. Ładunki powodują szybkie kurczenie się siłowników, umożliwiając maszynie o długości 47 mm poruszanie się z szybkością jednej długości ciała na sekundę. Robot składa się z segmentów, które można łączyć ze sobą za pomocą magnesów, co pozwala operatorowi dostosować dokładny projekt w zależności od specyfikacji linii, która ma być kontrolowana.
„Możemy umieścić takiego robota w przenośniku silnika lotniczego i sprawić, by poruszał się na całej jego długości, wysyłając po drodze obrazy” – podsumowują naukowcy.
Czytaj więcej
Grawitacja i ciemna materia nie istnieją: najważniejsze w nowej pracy fizyków
Coś dziwnego dzieje się we Wszechświecie: jak wyjaśnić niespójności w stałej Hubble'a
Dlaczego tak naprawdę chcą anulować boloński system edukacji w Rosji?