Engenheiros da Universidade de Cambridge desenvolveram uma mão robótica macia impressa em
Os pesquisadores usaram impressosUma mão antropomórfica implantada com sensores táteis em uma impressora 3D para que a mão “sinta” o que toca. A mão só era capaz de movimentos passivos com base no pulso. “A grande vantagem desse projeto é a amplitude de movimento que podemos obter sem usar nenhum atuador”, dizem os autores.
Treinando um braço robótico “passivo”. Vídeo: Universidade de Cambridge
Os cientistas realizaram mais de 1.200 testes com um braço robótico,observando sua habilidade de pegar pequenos objetos sem deixá-los cair. Inicialmente, o robô foi treinado usando pequenas bolas de plástico impressas em 3D e as agarrou usando ações predeterminadas derivadas de demonstrações humanas.
O robô usou tentativa e erro paradescobrir qual captura será bem-sucedida. Depois de terminar o treino com a bola, ele tentou pegar vários objetos, incluindo um pêssego, um mouse de computador e um rolo de plástico-bolha. Nesses testes, a mão foi capaz de agarrar com sucesso 11 de 14 objetos.
Capturar objetos de diferentes tamanhos, formas e texturas- uma tarefa simples para uma pessoa, mas difícil para um robô. A maioria dos robôs avançados de hoje não é capaz de executar tarefas manipulativas que crianças pequenas possam realizar facilmente. Por exemplo, as pessoas sabem instintivamente quanta força aplicar para levantar um ovo, mas para um robô isso é um problema: não forte o suficiente fará com que o objeto caia, forte demais quebrará o ovo.
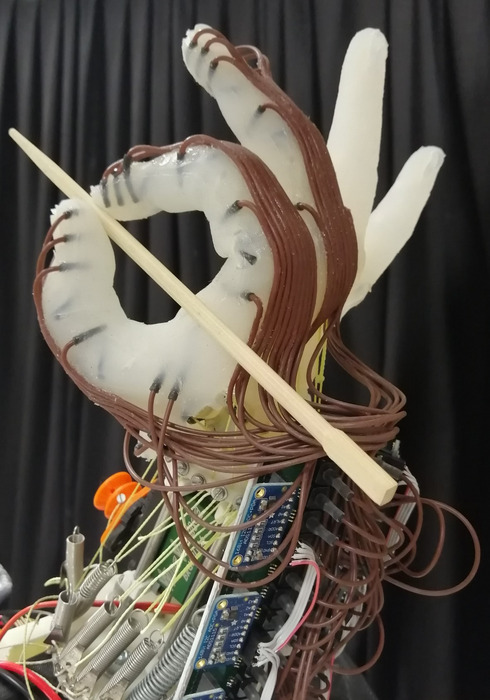 Garra robótica protótipo. Imagem: Universidade de Cambridge
Garra robótica protótipo. Imagem: Universidade de Cambridge
Tecnologia sofisticada com dedos motorizadosrequer uma quantidade significativa de energia e um grande número de atuadores complexos e caros para cada junta. A pegada passiva proposta pelos engenheiros torna o robô muito mais fácil de controlar e muito mais eficiente em termos energéticos. Os pesquisadores acreditam que seu design adaptável pode ser usado para desenvolver robótica de baixo custo capaz de movimentos mais naturais.
Consulte Mais informação:
Veja o mapa de maior resolução de Marte: 110.000 quadros e 5,7 trilhões de pixels
"Mar" de quarks dentro de um próton: do que consiste uma partícula elementar
Nova imagem do Hubble intriga cientistas
Na capa: um protótipo de garra robótica. Imagem: Universidade de Cambridge